
全州反馈的概念用于反馈控制系统理论,以便将系统的所有闭环极线放置。两极对应于系统的动态行为,因此将它们放置在所需的位置可能会引起人们的极大兴趣。状态空间控制器加载项使您可以在ComsolMultiphysics®软件中的系统模型中添加完整的状态空间反馈控制器。在这篇博客文章中,我们简要回顾了完整的状态反馈,描述了如何使用加载项,并以示例进行了演示。
关于全州反馈
完整的状态反馈假设系统的闭环动力学是在表单上
如果\ boldsymbol {d} = 0,只要系统是可控。
实施具有加载项的状态空间反馈控制器
加载使您能够对您的模型实施一些功能。状态空间控制器加载项(如Comsol Multiphysics版本5.6)可用,可让您放置闭环系统的电线杆。
有关控制器加载项的另一个示例,请参见博客文章:如何使用PID控制器加载项模拟控制系统。
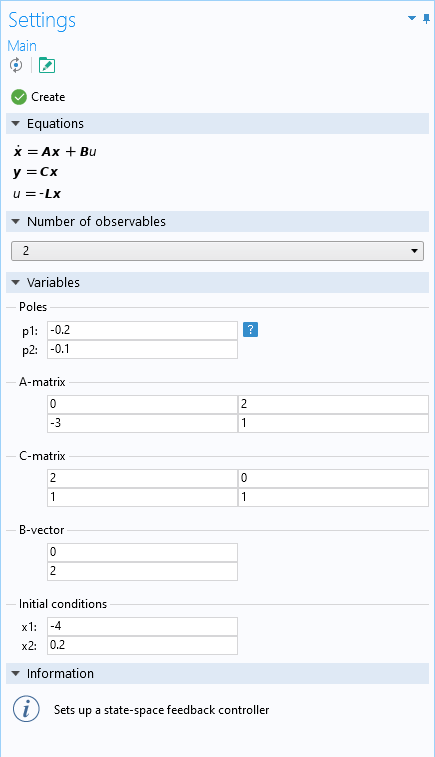
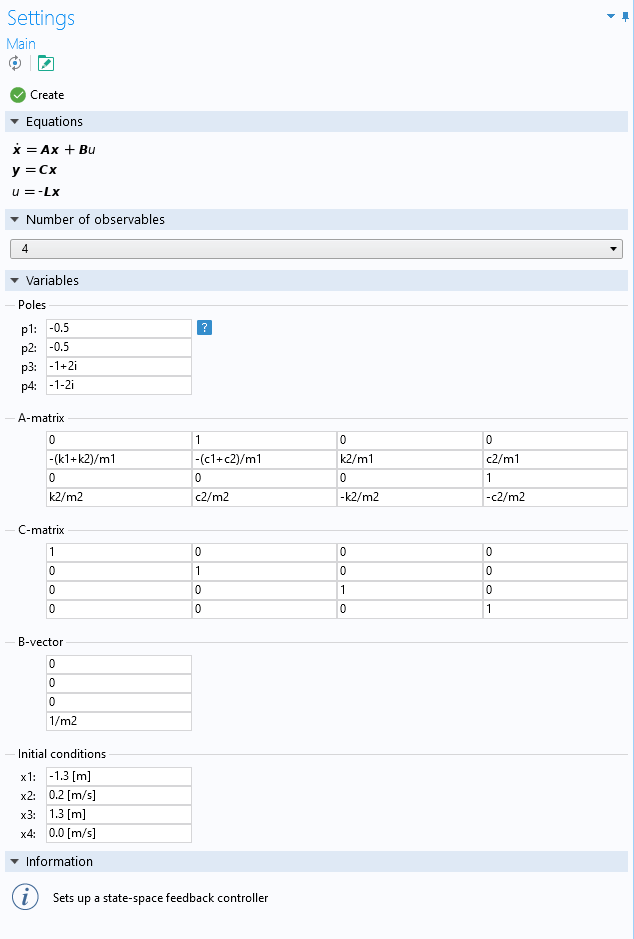
这设置状态空间控制器加载项的窗口。
您可以定义所需系统的可观察到的数量以及矩阵\ boldsymbol {a}和\ boldsymbol {c},矢量\ boldsymbol {b},初始条件以及将极点放在复杂平面中的位置。然后,加载程序创建了一个新的0D模型组件,该组件可以使用全局方程。这信息部分提到相关组件以及一旦创建控制器,如何访问输出变量。控制变量可用于你。
以下是如何使用加载项的示例。
反对双重机械质量抑制示例的力
举例来说,描述质量质量点的系统m_ {1},一侧连接到带有弹簧和阻尼器的墙壁,另一侧与第二点质量m_ {2},也有弹簧和阻尼器。第二个质量又由一支力量作用,F,应控制以达到平衡。
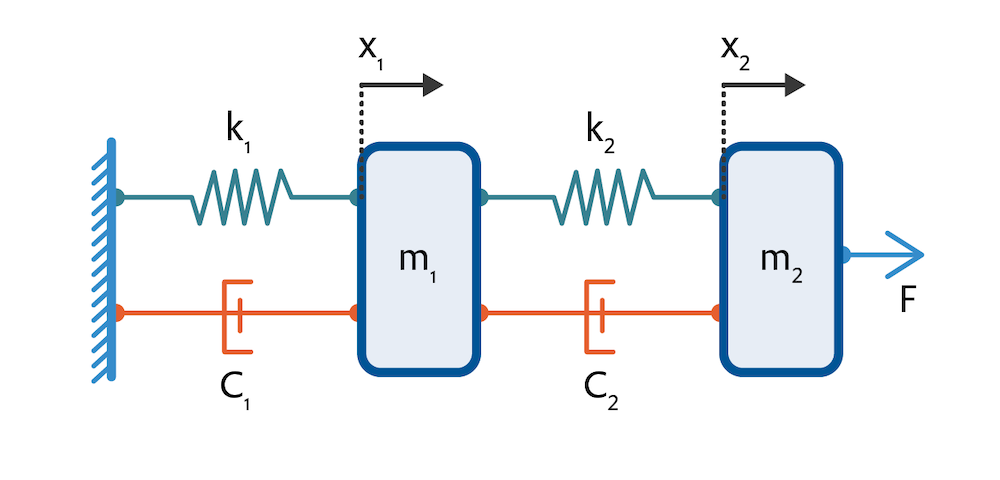
该系统由以下方程式描述,这是牛顿第二项运动定律的实例,并使用点表示法来指示时间衍生物:
在哪里k_ {1}和k_ {2}是两个弹簧的弹簧常数,C_ {1}和C_ {2}是两个阻尼器的阻尼常数,以及\ tilde {x} _ {1}和\ tilde {x} _ {2}描述两个质量与它们各自的平衡位置的偏差。
引入四个新变量,x_ {1} = \ tilde {x} _ {1},\,x_ {2} = \ dot {\ tilde {\ tilde {x}}} _ {1},\,x_ {3} = \ tilde = \ tilde {x}}2},,和x_ {4} = \ dot {\ tilde {x}} _ {2},我们在表格上达到一个系统
和
0&1&0&0 \\
- (k_ {1}+k_ {2})/m_ {1}& - (c_ {1}+c_ {2})/m_ {1}&k_ {2}/m_ {1}&c_ {1}&c_ {2}/m_ {1} \\
0&0&0&1 \\
k_ {2}/m_ {2}&c_ {2}/m_ {2}&-k_ {2}/m_ {2}&-c_ {2}/m_ {2}/m_ {2}
\ end {pmatrix},\,\ text {and} \ boldsymbol {b} = \ begin {pmatrix}
0 \\
0 \\
0 \\
1/m_ {2}
\ end {pmatrix}。
在这种情况下,控制变量,你,是力量,F, 和\ boldsymbol {c}是身份矩阵。我们将将常数定义为参数,如下所示。
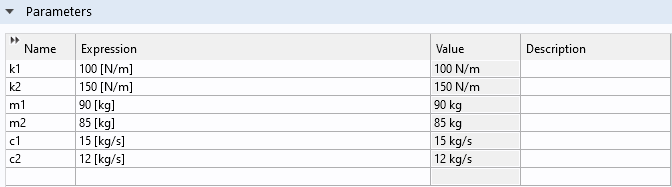
常数的定义。
现在,我们可以使用状态空间控制器加载项来放置闭环系统的极点。假设我们想要四个真实的杆,全部为-0.5。由于我们有四个可观察到的东西,因此我们设置了加载项,如下所示。
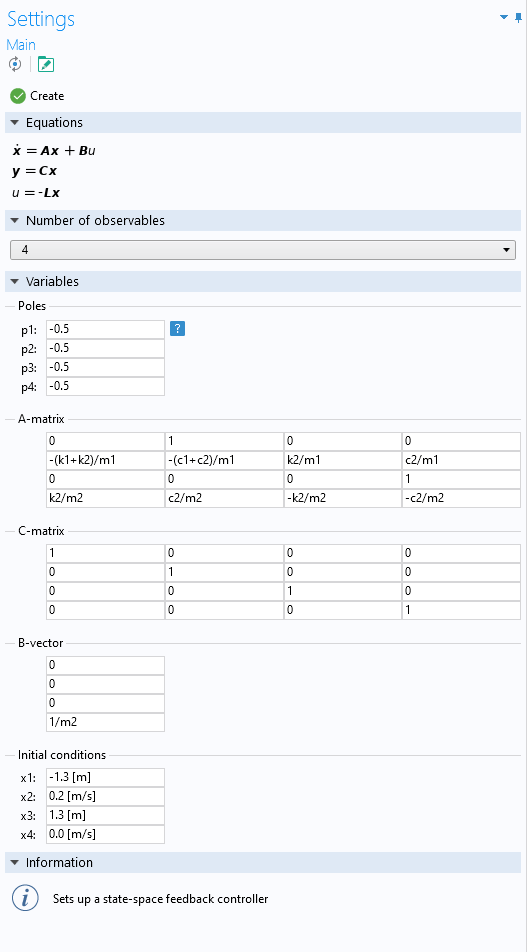
双重机械质量压抑系统的状态空间控制器设置。
选择了初始条件,以使第一个质量在负面的1.3 m开始X从其平衡的方向,速度为0.2 m/s,第二个质量在静止时开始,正处于1.3 m。X从其平衡方向。
通过点击创造,我们收到以下消息。
从状态空间控制器中的输出变量描述。
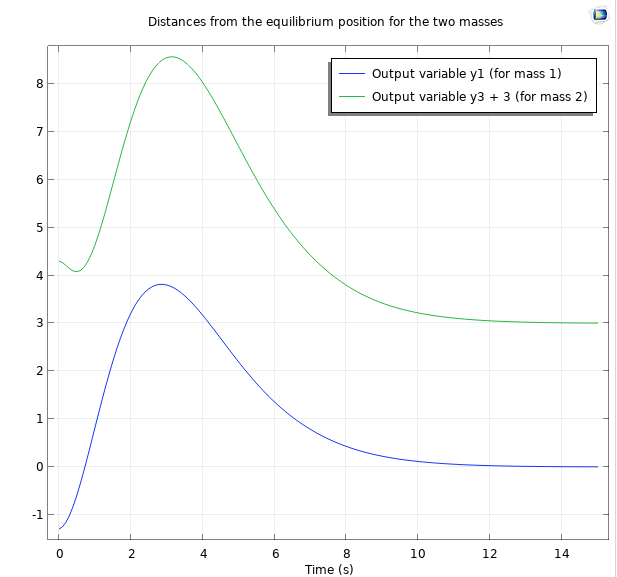
现在,我们可以进行一项研究,并假设质量在平衡下分离3 m,我们可以绘制变量Y1和Y3+3为了查看其位置的时间演变。自从Y1和Y3是两个质量的平衡位置的距离,Y3+3当两个质量分离3 m时,是质量2与质量1的平衡的距离。
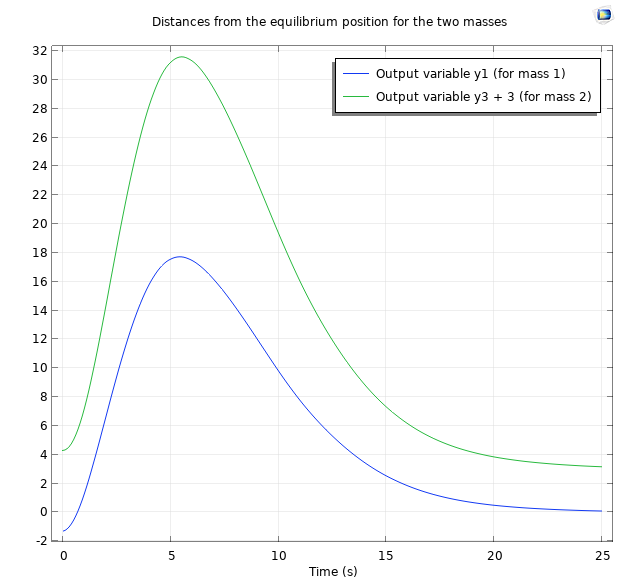
当所有电线杆放置在-0.5时,两个质量的位置在前25秒内。
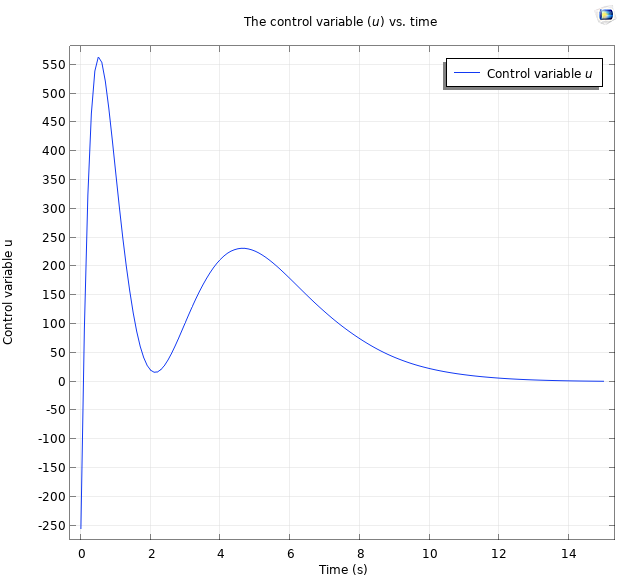
我们还可以绘制该力,该力可作为控制变量访问,你。我们达到以下情节。
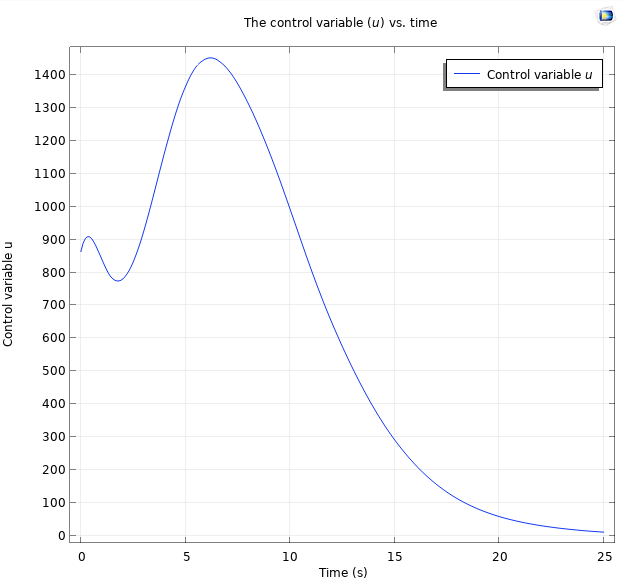
当将所有极点放置在-0.5时,在模拟的前25秒绘制了控制变量。
假设我们对上述系统的结算时间不满意。从控制理论中,我们预计如果我们将极点进一步放入负面的真实平面,则将减少定居时间。如果我们遵循上面的过程,将所有极点放在-1而不是-0.5,我们将获得以下位置的图。
将所有极点放置在-1时,前15秒的位置图。
此外,我们获得了控制力的以下图。
当所有极点置于-1时,力图在前15秒内。
正如预期的那样,该系统会更快地解决。
在状态空间控制器加载项中,也有可能将极点放在复杂的平面中。复杂的杆总是随着复杂的缀合物的成对而出现。
带有两个复杂杆的状态空间控制器设置。
这将导致以下位置和控制信号图。


在-0.5处的两个真实极点的位置图和-1+2i和-1-2i分别(左)和-1+2i和-1-2i。两个真实极点的控制信号图分别为-0.5,分别为-1+2i和-1-2i(右)。
杆位
从上一节中的模拟中可以看出,系统的行为可以大大改变,具体取决于放置闭环系统的杆的位置。很难找到对杆的放置如何影响任意系统的一般描述。但是,可以说,将连续系统的电线杆放置在上面的系统中应导致更快的稳定,但可能会导致更大的控制信号。使用状态空间控制器加载项,您可以轻松评估各种杆位的系统行为。
评论(4)
伊瓦尔·凯尔伯格(Ivar Kjelberg)
2021年3月24日不错的博客马格努斯:),
但是,如果您可以向我们展示如何直接从完整的Comsol FEM模型中提取“减少状态空间矩阵”的步骤怎么办?
好像我们采用了一个简单的支撑“光束”,由某些力传感器以半长的形式驱动,梁尖端位置由某些“传感器”探针测量,我们想通过状态空间控制器控制“机械”,我们现在应该能够使用模型还原工具直接从FEM模型中提取还原的状态矩阵,不是吗?
然后,我们不需要完全重写上面的所有方程并手动输入它们。
大约30年前,我们以前的Nastran Fem专家与Brio一起做到了这一点,但他十年前退休了……
我们今天也应该能够与comsol一起做,但是我还没有找到任何“程序”来确保我做对了,也许您可以在这里帮助Magnus?
因为这确实是一种非常有力的方法,可以直接从我们的模型中获得状态空间封闭循环控制器的最佳开始。
真挚地,
伊瓦
马格努斯环
2021年3月25日 comsol员工嗨,伊瓦尔,谢谢!
是的,您的建议似乎是此示例的自然扩展。我们将研究它。
此致,
马格努斯
穆罕默德·阿尔努伊姆(Mohammed Alnuaimi)
2021年7月12日嗨,马格努斯,
感谢您的博客…
您和您的团队是否找到了做Ivar建议的方法……如果您可以为我们提供解决此问题的解决方案,这将非常有帮助……
谢谢,
此致,
穆罕默德,
马格努斯环
2021年7月19日 comsol员工嗨,穆罕默德,
当前版本的comsol Multiphysics仍然是5.6版,因此该功能尚未更改,但是在计划将来的Comsol Multiphysics版本中的其他功能时,我们将考虑您的反馈。
此致,
马格努斯