
想象一下,您正在公路旅行,以60 mph的速度沿高速公路巡游。为了保持这种速度,您决定打开巡航控制。毕竟,您正在度假 - 为什么不让汽车为您工作呢?无论您是上坡还是下坡,汽车都会对速度的变化,加速或自动放缓的变化做出反应。这种类型的过程控制是由于比例综合衍生(PID)控制器。使用仿真,工程师可以优化这种控制设备。
导航过程控制
当将速度,温度,流速,压力等变量分解时,过程工程师可以使用自动连续控制来调节系统。过程控制涉及一致性,通过控制系统或设备来管理各种复杂的过程。自动过程控制的一种早期形式是离心总督,它使用旋转权重来在风车等系统中达到平衡。不久之后,在蒸汽机上实施了一个省长的版本,摆板调速器被申请进行速度控制。
在1920年代,工程师Nicolas Minorsky的想法是将PID用作控制形式。他的灵感是通过观看Helmsmen Steer船的启发,在强风和波涛汹涌的海洋中手动纠正路线。Minorsky在为美国战舰上进行转向系统时,开始开发一个控制理论的公式,该公式发展成为我们今天所知道的三届PID控制。

船舶转向的手动控制是PID理论的灵感。美国海军和美国的公共领域的图像Wikimedia Commons。
随着时间的流逝,PID设备已经进行了一些迭代(技术从气动到电子的更新)。PID控制器是一种基于算法的反馈机制,它可以连续计算所需的设定值(SP)和过程变量(PV)之间的误差。可以将PID控制器应用于机制中,以自动校正系统并将其PV保持在所需的SP(例如维持移动汽车的一定速度)。
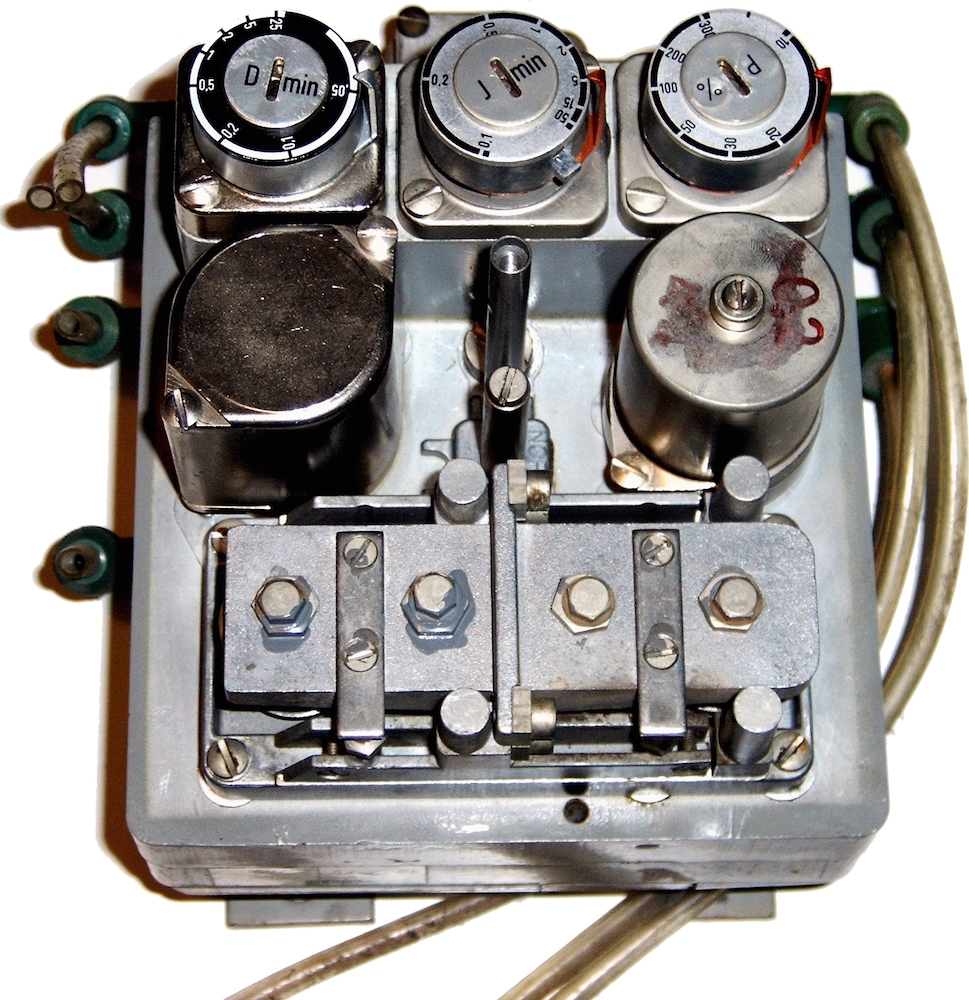
一个带有可调节表盘的气动控制器,以调整P,I和D术语。SNIP3R的图像 - 自己的作品。获得许可CC BY-SA 3.0, 通过Wikimedia Commons。
PID控制通常用于化学工程中,帮助工业设施自动始终如一通过调整软件调整受控系统。为了在这些领域和其他领域进行更准确的控制,工程师可以通过使用COMSOLMultiphysics®软件将PID控制器算法耦合到其模型来分析该过程。
3 PID的数学术语
比例综合衍生算法由三个控制术语组成,它们共同起作用,以获得最佳响应。每个项根据SP和PV控制信号进行不同的计算。当三个术语一起使用时,设备会产生一个控制信号,该信号可以进行校正以返回所需的SP。
每个PID术语都是控制的一个方面,它消除了错误的计算,以计算错误的当前,过去和未来:
- 比例:给出与当前误差值成正比的输出。
- 积分:随着时间的流逝,整合误差的过去值以计算I因子。为了将错误提高到零,几乎总是包括在内。
- 衍生产品:估计误差变化的未来率,以弥补P和I因素所做的任何过冲。该部分通常被关闭,因为在实际应用中,它可以扩增随机干扰的效果,然后对控制器的稳定性产生负面影响。
大多数情况下,使用PI的组合,偶尔使用PID,并且很少使用PD(例如控制伺服电机)。P也可以自身使用。
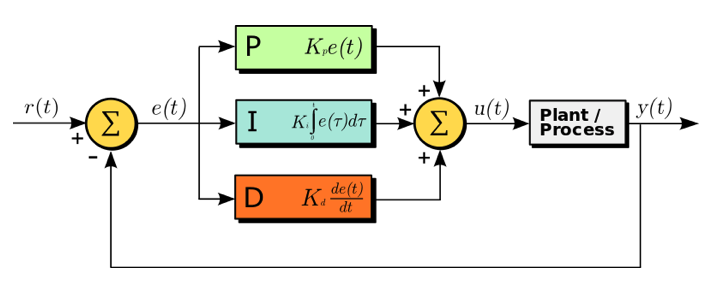
反馈循环中的PID控制器的图,其中r(t)为sp和y(t)是PV。图像Arturo Urquizo - 自己的作品。获得许可CC BY-SA 3.0, 通过Wikimedia Commons。
因为这三个组件需要在控制系统中同时同时工作,所以很难将PID算法中的参数恰到好处。使用comsol多物理学但是,您可以实现PID控制算法来模拟过程控制系统,从而使您能够找到最佳控制参数。此外,如以下流量混合物所示,可以将过程控制机制与Comsol®软件中的模型耦合。
使用PID设备模拟过程控制
在燃烧室的模型中,将两个入口(固定的上入口和受控左入口)与PID控制器耦合。在腔室内,将两个气体流组合在一起。在这里,流量控制的PV是腔室中某个测量点处的氧气浓度。
PID控制器用于达到0.5 mol/m的所需浓度(SP)3在测量点。它通过调节左入口的速度,以较低的氧气含量增加或减少气体的流动。具有较高氧气含量的气体以10 mm/s的上部入口进入。
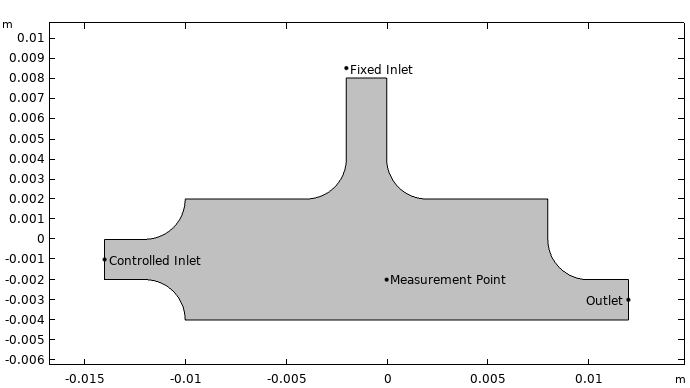
燃烧室的几何形状。
为了说明会议厅中的流量,我们使用层流界面,计算流动的速度和压力。然后,为了计算质量平衡,稀释物种的运输使用接口,考虑到对流和扩散这是两个流动流和化学物种的通量发生的。(有关质量传输方程边界条件的详细信息,请参阅模型文档)
使用浓度测量模拟域点探针特征。PID算法是通过用户定义的变量实现的全局方程。该算法用以下参数计算PID控制的速度:
- C放- 设定点
- kp- 比例系数
- kl- 积分系数
- kd- 导数系数
在此示例中,我们将重点关注改变比例系数的效果(kp)。
评估模拟结果
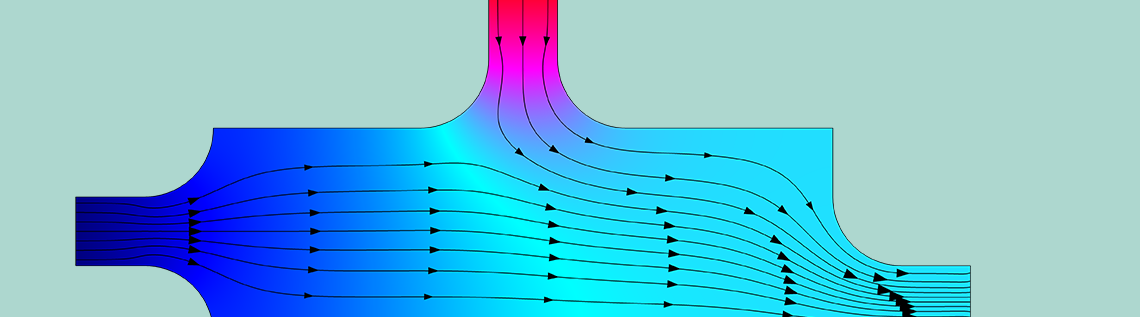
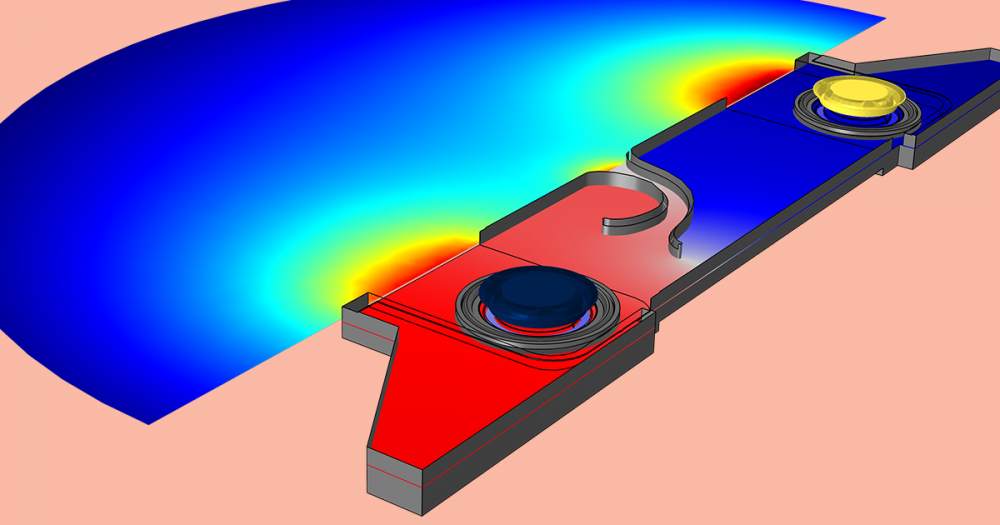
首先,在腔室内,让我们看一下速度流线的两个快照和0.1 s(左图)和1.5 s(右图)后的氧气浓度。您可以看到,在较早的时候,进入受控入口的流速度仍然很低,并且传感器完全暴露于顶部入口的高度浓缩氧气流。然后在以后的时间,为了降低浓度,控制器增加了左入口速度。因此,PID控制器正在按预期执行,从而改变了维护SP。结果还表明,正如预期的那样,测得的氧浓度在很大程度上取决于流场。


在0.1(左)和1.5 s(右)后,燃烧室中氧气(颜色图)和速度场(流线)的浓度。
下图显示了PID控制的入口速度(左)和浓度在测量点(右),随着时间的时间(右),对于两个比例参数的两个不同值,KP = 0.5 m4/(mol-s)和kp = 0.1 m4/(mol-s)。在这两个结果中,一个较小的结果kp价值(蓝色)比较高的振荡更大kp稳定前的值(绿色)。了解这种趋势有助于我们优化PID控制算法中的参数。


随着时间的流逝,PID控制的入口速度(左)和右点(右)的浓度kp= 0.5 m4/(mol-s)(蓝色)和KP= 0.1 m4/(mol-s)(绿色)。
展望未来,您可以将相同的建模技术应用于其他PID术语,以便继续改进控制器,并为其他系统模拟PID控制器。
下一步
通过单击下面的按钮前往应用程序库来尝试PID控制器示例,您可以在其中下载PDF文档和Model MPH文件。
在此博客文章中了解有关过程控制的更多信息:通过组件耦合实现简单的温度控制器
评论(2)
伊瓦尔·凯尔伯格(Ivar Kjelberg)
2019年6月13日嗨,托马斯
有趣的沼泽,您是否考虑在模型矩阵提取和某些状态空间控制器上添加一个,或者使用第一个COMSOL模型提取的逆模型馈电?
Comsol中的最新矩阵提取功能似乎是可能的,但是我缺少一些简单的示例……
提前致谢
退休,但仍然很有趣
伊瓦
克里斯蒂·陈
2020年7月7日http://www.labideal.com提供优质的真空成分,波纹管软管,真空配件和法兰,真空阀,真空泵,真空室,真空消音器,过滤器,以低价的陷阱和全世界的免费送货。