
假设您对将变形的零件有一些CAD描述,例如灵活的打印电路板。这些CAD零件以其未完整的,制造的状态设计。但是,出于分析目的,我们只对变形的,组装的状态感兴趣。在这里,我们将研究一组用于包装和翘曲几何形状以及对变形部分周围的空间进行建模的技术。让我们了解更多!
定义变形形状
让我们考虑下面所示的示例几何形状:一条薄的柔性材料的厚矩形条,一侧具有电极图案。这类似于我们在电容传感器。对于更复杂的模式,您可以使用comsolMultiphysics®软件的核心软件包的DXF导入功能,或ECAD进口功能ECAD进口模块的。
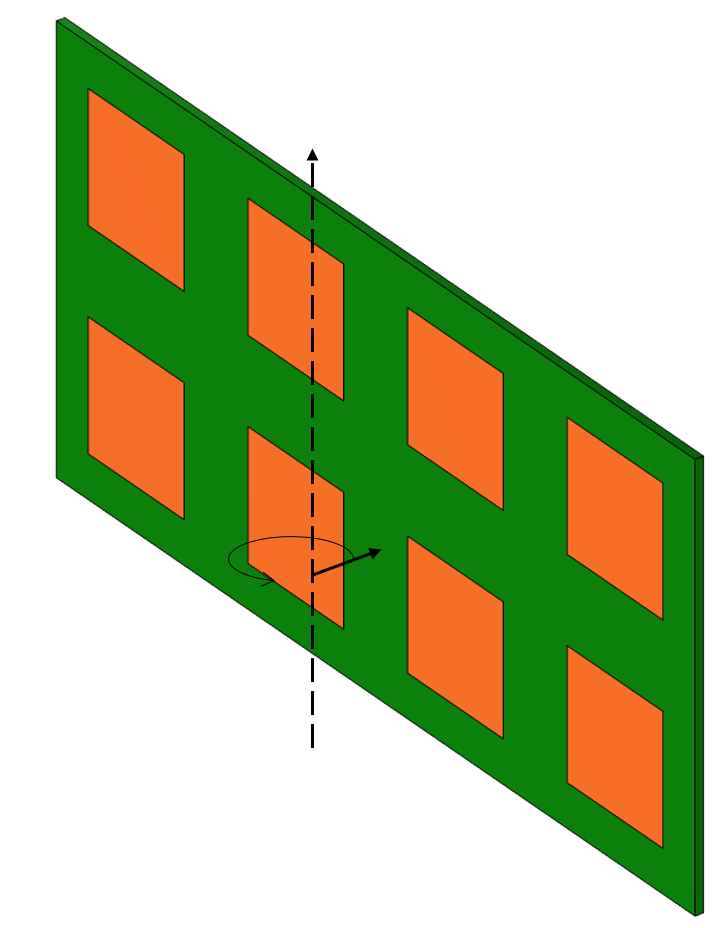
一个柔性部分,将包裹在一个轴周围。
我们将根据以下假设来定义该部分的变形,即这种施加的变形足够相似,与我们通过求解几何非线性(可能是材料非线性)固体力学方程来获得的实际变形。也就是说,我们将避免通过假设变形场来解决变形。
我们将考虑单一弯曲的变形,因此我们可以通过查看弯曲轴正常的2D平面来构架讨论,如下图所示。我们想要的是变形这一细微的部分,以使其中心线长度及其体积不变。这很容易通过在圆柱坐标中定义片段,笛卡尔坐标和变形状态之间的零件状态之间的映射来完成。
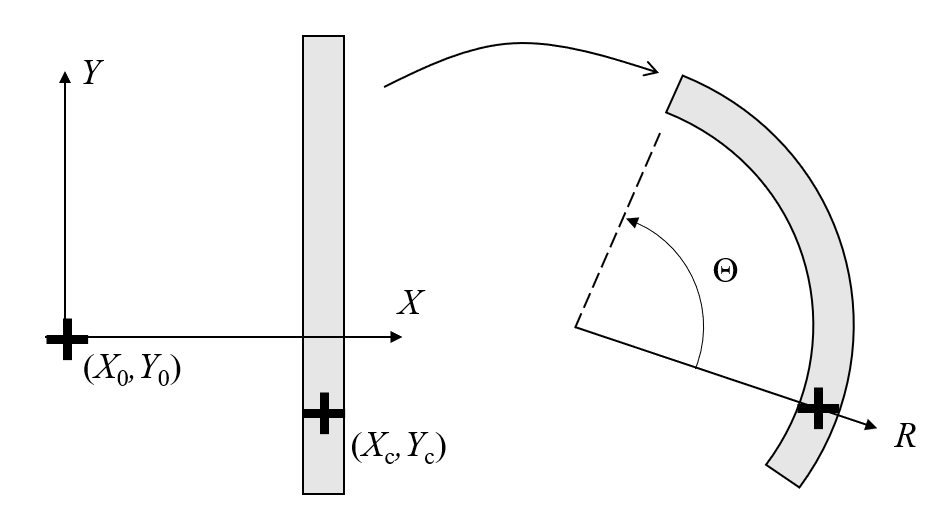
包裹轴的零件涉及定义笛卡尔未呈现状态的每个点之间的映射到圆柱形变形状态。
为了定义此映射,将CAD部分保持与全局笛卡尔坐标系对齐是最简单的X- 轴对应于包裹状态下的径向方向。接下来,定义一个点(x_0,y_0)零件将被包裹在周围(x_c,y_c)在太空中固定的部分。这些点之间的距离是R_0。然后,考虑一个以同一原点点为中心的圆柱坐标系r- 指向相同两个点之间的轴。选择一个点(x_c,y_c)那是在零件的中心(假设均匀的厚度)意味着包裹零件不会更改音量,但是如果需要伸展或压缩域的拉伸或压缩,则可以选择其他点。例如,选择位于零件表面的点意味着该表面不会改变区域。
要定义此变形,请定义一组映射指向指向的表达式xy- 平面到点r \ theta-飞机。
从中,变形表达式是:
这些变形表达式可以直接在规定的变形功能移动网格或者变形的几何形状接口。对于包裹任意轴的情况,需要构建完整的三维旋转矩阵。定义任意旋转在这篇学习中心文章。实际上,在可能的情况下首选包裹笛卡尔轴。这种变形的结果如下图所示,可以直接在此变形状态下进行进一步的分析。
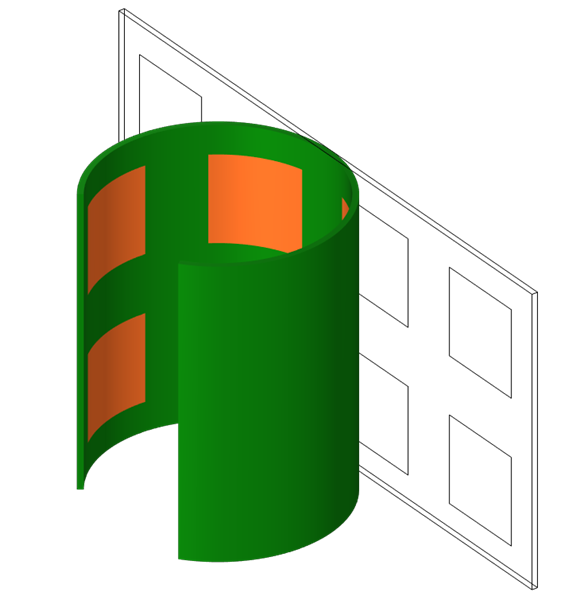
包装后变形部分。
通过第二个组件和网格汇总周围域
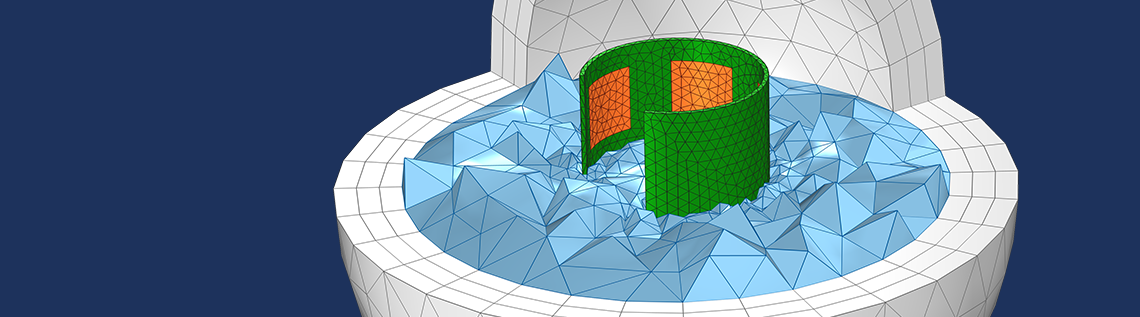
尽管将零件本身变形本身很有趣,但我们通常也需要关注该部分周围的空间。例如,我们可能想在自由空间内建模包裹的零件,围绕变形部分的复杂形状本身在另一个域内,例如表示一组代表一个域无限元素或完美匹配的层。在我们包装的部分的下图中显示了这种情况的一个例子,坐落在一个空的,未发现的球形空间中,该空间在外部周围有一组网状的球形层。
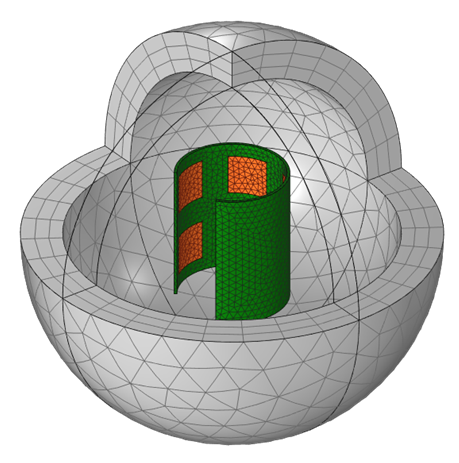
包裹的部分在空的,未发现的球形空间和外部元素的网状球形层中。
如我们所见,有两个问题:
- 包装部分现在具有变形的网状
- 周围空间中没有网格
我们想重新放下这个包裹的部分,并在相邻域中引入网格。第一步非常容易:我们只需要重新发送变形配置,然后在我们的第一个中给了我们第二个网格零件在我们的模型中。
接下来,我们必须将第二个组件引入我们的模型,以及网第二个分支零件,我们从第一个导入重新定义的状态零件。这复制了网格,并允许我们引入其他网格操作。我们只需要添加两个其他功能。首先,a创建域功能将从所有完全封闭的自由空间区域中创建域,例如我们包裹的部分和外层之间的空间。第二,我们添加一个自由四面体特征,它与我们刚刚创建的域相融合:包裹零件和封装的外壳之间的音量。现在可以将此网格用于第二次的进一步分析零件模型。

基于第一个组件的变形配置的网格将导入到模型中的第二个组件中。零件周围的周围自由空间可以定义为域和啮合。
关于包装和扭曲几何形状的关闭言论
我们引入了一种方法,可以通过显式变形将CAD零件并将其包裹在轴上。我们还介绍了一种轻松缠绕变形部分周围的空间并将其用于进一步分析的方法。值得注意的是,当计算固体的变形而不是规定时,这种复杂的方法也将起作用。但是,如果需要简单的包装,此处显示的方法要简单得多。还可以规定更复杂的变形形状,只要可以定义未变形和变形状态之间的映射即可。
该技术可通过下面的按钮获得:


评论(2)
伊瓦尔·凯尔伯格(Ivar Kjelberg)
2021年9月12日你好沃尔特,
像往常一样,感谢您的博客,给出了有关如何处理高度变形结构的新提示。
然而,对于结构性,我有一点评论,如果条带是由不同的材料制成的,则可能没有均匀的刚度,因此,如果零件滚动,完全规则的形状不会成为“真实的最终形状”。并且通过滚动(在横向边缘上施加纯扭矩)来累积应力,将与定期滚动的规定变形解决方案有所不同。
由于最终“滚动”状态中的压力积累可能对于疲劳或一般终身分析至关重要,因此在这里可能需要执行几个步骤,即首先“开处方”按照您描述的方式滚动该部分,然后阻止边缘和离开零件放松并找到自己的中立位置,然后从那里继续。
无论如何,很棒的提示,我看到您似乎有一个新的(对我来说,只是吗?)“学习中心资源”的Web side在这里引用,但我在您的网络学习中心网页上找不到它的一般切入点,可能它的“来”。
真挚地
伊瓦
沃尔特·弗莱
2021年9月13日 comsol员工你好伊瓦,
谢谢你的意见。
我应该更强调的是,该方法也可以与固体力学结合使用。也就是说,可以解决固体部分的变形状态(可能包括皱纹,应力浓度等……),然后在分析的第二部分中使用该变形状态。
但是,设置和解决如此高的非线性结构问题(它将涉及几何,材料,甚至可能接触非线性,并且需要确切地知道如何在制造过程中如何应用力,以说出任何复杂性都没有引入通过粘合或胶粘剂)即使对于经验丰富的结构分析师来说,也可能很耗时。
有时,即使该技术施加的变形状态并不是正确的,我们只想对假定的变形状态进行电气(甚至其他物理学)分析。并记住,我们可以引入更复杂的表情(//www.dvdachetez.com/blogs/how-to-generate-random-surfaces-in-comsol-multiphysics/)如果我们想从理想的弯曲形状中看到随机偏差或已知变化的效果,就像我们在这里所做的那样。正是在这里解决的用例。
再次感谢您的反馈,并请注意更多即将到来的资源!
此致,
沃尔特