通过外部Matlab®文件嵌入ComsolMultiphysics®磁性悬浮模型中的自定义控制器
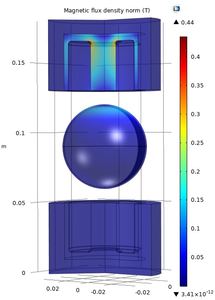
为特定设备或过程设计专用控制器的正确方法是计算适当和代表性的模型。在磁性悬浮系统的情况下,通过普通微分方程的数学建模受到代表电磁体产生的电磁力并与物体作用的分析函数的限制。对建模的多物理方法允许使用几何和材料属性扩展建模,以及物理现象在设备/过程动力学中起重要作用。主动磁悬浮和嵌入式控制器的设计[1,2,3]表明,一些使用多物理模型的人可以获得新的结果和应用。在AGH的磁悬浮实验室中,出于研究目的,有许多活跃的悬浮系统(悬浮液和轴承)。其中之一是带有圆柱电磁体的主动磁悬浮液。使用ComsolMultiphysics®Axi对称模式对相反动作的主动磁性悬浮系统中的双电磁体进行了主动磁性悬浮系统。ComsolMultiphysics®AC/DC模块用于对电磁场进行建模。应用移动网格模式以获得悬浮球的自由运动。另外,使用ode界面来获得悬浮球运动的普通微分方程的解。 For this research the bottom electromagnet was not used. Two forces were acting on the sphere: the gravity and the electromagnetic one. The electromagnetic force generated by the electromagnet was computed by the solution of magnetic field problem. Therefore, the value of electromagnetic force depend on the applied geometry, materials and coil configuration. In this research the electromagnet is steered by the controller computed externally: in the m-file. Thanks to the COMSOL Multiphysics® LiveLink™ for MATLAB®, it was possible to design and realize the controller in the m-code (see Fig. 1). The embedded controller was realized as a nonlinear one based on Fuzzy Logic approach using Mamdani type architecture. The output control surface is nonlinear (see Fig. 2). The synthesis of the controller was done using MATLAB® tools and exported to the appropriate files for external computations. Using the realized model and MATLAB® features it is possible to design any kind of linear and nonlinear controller. In every COMSOL Multiphysics® computational step, the controller equation was calculated using formulas embedded in m-file on the basis of actual state (sphere position and velocity) exported from COMSOL Multiphysics® model. In the postprocessing mode it is possible to analyze magnetic field distribution during control stage (see Fig. 3). The initial conditions for the sphere and coil current were set and the problem was solved in time domain using BDF method with strict time stepping set to 5ms in a range up to 2.5seconds. The levitating sphere displacement versus time for a few configurations of the nonlinear controller are presented in Fig. 4. As result we obtained a fully functional virtual prototype consisting of a nonlinear model and nonlinear controller. This valuable tool is open for any kind of control system architecture design and simulation research prior to real-time experiments.
下载
- pilat_slowik_poster.pdf- 0.29MB