通过变形的几何形状和移动网格接口应用翻译,缩放,反射和旋转
这变形的几何形状和移动网格接口对于建模域变形的情况以及以完全规定的方式移动的情况,无论是时间的函数还是在参数扫描或辅助扫描中的模型参数的函数。使用这些接口通常避免任何重新构图或求解其他方程式。
移动的网格和变形的几何界面
在大多数情况下,移动网格接口是适当的使用接口,因为在此接口中,材料和解决方案以空间变形而移动。这变形的几何形状另一方面,界面意味着材料在通过空间转换时从域中添加和去除固体力学接口本身计算在定义的固体材料的变形材料框架。两者都无法解决固体力学和移动网格在同一域中。跟踪这一点的另一种方法是,这三个帧:
- 几何学框架坐标,默认
 ,固定在3D中的CAD几何形状中。
,固定在3D中的CAD几何形状中。 - 材料框架坐标,默认
 ,固定在实心域中的材料中。之间的区别材料和几何学框架坐标可能是由变形的几何形状或者形状优化模型中的功能。差异表示材料的不同配置,即有效地是固体对象的不同形状。
,固定在实心域中的材料中。之间的区别材料和几何学框架坐标可能是由变形的几何形状或者形状优化模型中的功能。差异表示材料的不同配置,即有效地是固体对象的不同形状。 - 空间框架坐标,默认
 ,固定在太空中。在空间和材料框架坐标可能是由移动网格功能或结构力学界面,控制空间框架。差异代表材料的位移。
,固定在太空中。在空间和材料框架坐标可能是由移动网格功能或结构力学界面,控制空间框架。差异代表材料的位移。
要验证用于制作地块的框架,请使用框架设置a数据集功能,如下屏幕截图所示。每个绘图组还可以在选定的帧中绘制数据集的边缘,如下所示。
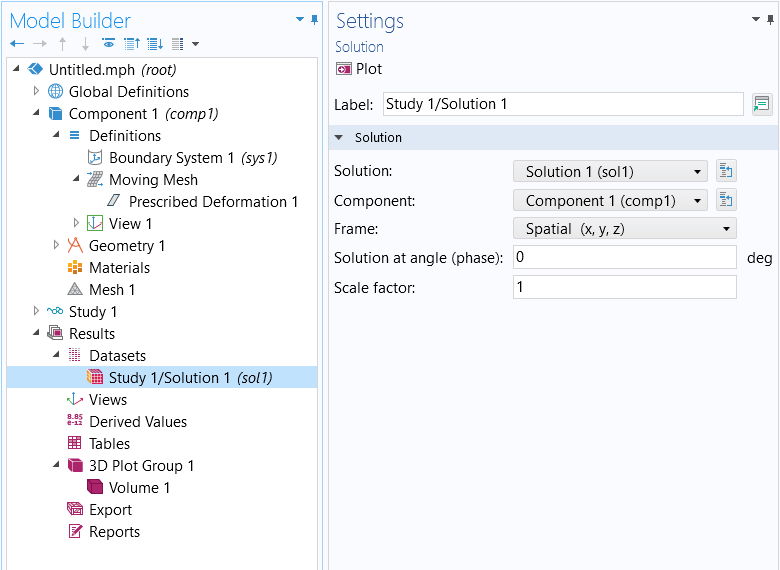
屏幕截图显示了如何选择用于绘制结果的帧。
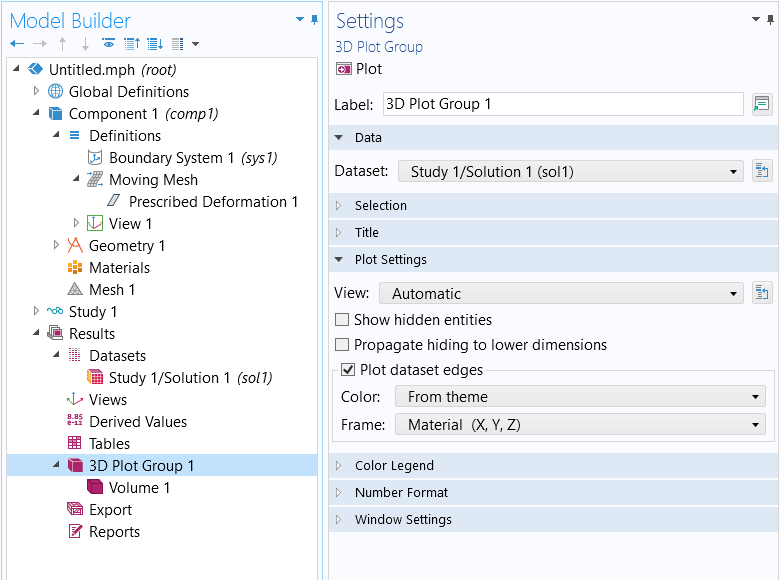
在每个绘图组中,也可以使用不同的帧绘制数据集边缘。
建模翻译
为了建模域的翻译,例如对于空间中的零件的运动,定义了空间中翻译曲线的表达: 。在一个内使用这些表达式移动网格>规定的变形功能使该域内的每个点都偏移了其原始位置相同的数量。
。在一个内使用这些表达式移动网格>规定的变形功能使该域内的每个点都偏移了其原始位置相同的数量。
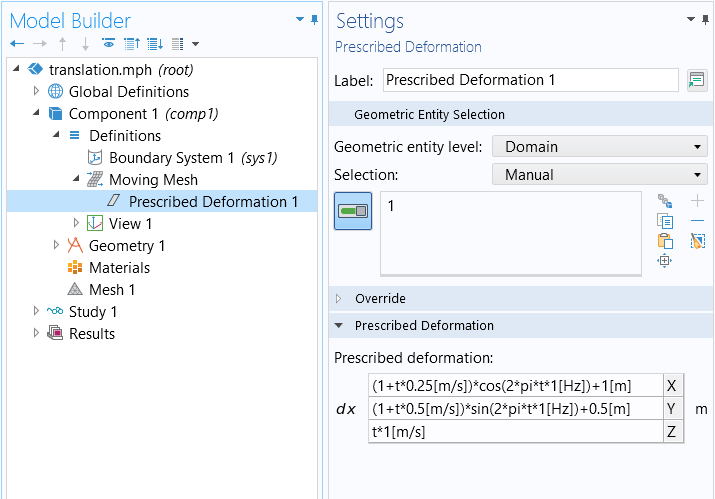
使用规定的变形实现翻译的功能。
例如,沿着平行于线的线中心的螺旋螺旋路径移动一个域z- 轴和偏移的原始位置,将这些表达式用于规定的变形:
dx =(1 [m]+t*0.25 [m/s])*cos(2*pi*t*t*1 [hz])+1 [m]
dy =(1 [m]+t*0.5 [m/s])*sin(2*pi*t*t*1 [hz])+0.5 [m]
DZ =t*1 [m/s]
该翻译示例如上所述,并在练习文件中实现。
建模缩放与反思
为了建模有关全球笛卡尔坐标系的扩展或收缩的域,有必要定义一个比例因子矩阵和扩展点。比例因子矩阵, ,是一个对角线矩阵,其条目对应于缩放笛卡尔方向。例如:
,是一个对角线矩阵,其条目对应于缩放笛卡尔方向。例如:

将离开X- 维度不变,缩放y- 偶数增加两个,并减少z- 偶数征服一半。
还必须定义范围缩放的点, ,这定义了域的变形场:
,这定义了域的变形场:

在哪里 是身份矩阵。
是身份矩阵。
因此,例如,通过上述比例因子矩阵缩放有关点1,2,3的零件,规定了:
dx =(1-1)*(X-1 [M])
dy =(2-1)*(Y-2 [M])
DZ =(0.5-1)*(Z-3 [M])
也可以制作时间或其他模型参数的术语函数。练习文件中实现了一个示例。
建模旋转,缩放和翻译
广义旋转的建模可能会变得复杂。这里解决了两种情况:围绕笛卡尔轴的旋转,以及更普遍的3D旋转情况。
对于围绕全球笛卡尔轴之一的旋转,足以定义单个旋转矩阵和旋转中心的坐标。例如,考虑通过平行于一条线的角度旋转零件z- 轴并通过该点 。与平行于任何线的任何线的旋转矩阵z- 轴为:
。与平行于任何线的任何线的旋转矩阵z- 轴为:

并且,要旋转点,使用变形:

这等同于使用旋转域特征。练习文件中包含一个示例。
对于零件在空间中旋转和任意移动的更一般情况,需要在概念上定义两个坐标系统, 和
和 ,在点
,在点 和
和 ,如下图所示。考虑第一个,,如零件。目的是旋转和移动零件以使零件坐标系与。
,如下图所示。考虑第一个,,如零件。目的是旋转和移动零件以使零件坐标系与。
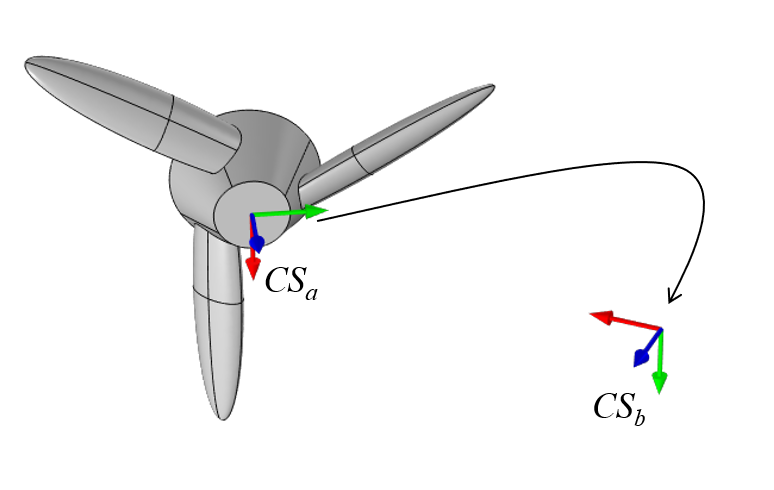
带有坐标系的零件,该坐标系将被旋转并移动到与第二个坐标系对齐。这些系统的第一,第二和第三轴分别以红色,绿色和蓝色显示。
两种坐标系都是根据两个正顺序向量定义的, 和
和 ,由交叉产品定义的第三个矢量:
,由交叉产品定义的第三个矢量: 。这些向量定义了转换矩阵:
。这些向量定义了转换矩阵:

此转换矩阵将使零件从一个坐标系旋转到另一个坐标系。上述矩阵等同于施加旋转,该旋转将零件从进入全球笛卡尔CS。应该进行此旋转,然后从全球笛卡尔旋转到并移至点,使用以下表达式进行变形:

也可以包括缩放。在坐标系,通过以下表达式使用组合缩放,旋转和翻译:

练习文件中的一个例子。
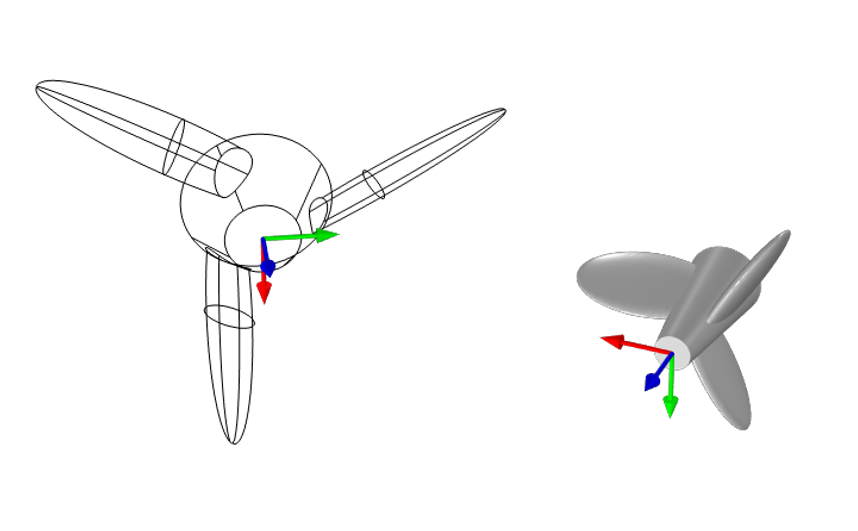
在两个坐标系统方面,应用了翻译和各向异性缩放和旋转。原始未变形部分在线框中显示。
提交有关此页面的反馈或联系支持。