Applying Translations, Scaling, Reflection, and Rotation via the Deformed Geometry and Moving Mesh Interfaces
这变形的几何形状and移动网格interfaces are useful for modeling situations where a domain is deforming, as well as when it is moving in a completely prescribed way, either as a function of time or as a function of a model parameter in a parametric sweep or auxiliary sweep. Using these interfaces usually avoids any remeshing of the geometry or solving of additional equations.
移动的网格和变形的几何界面
在大多数情况下,移动网格interface is the appropriate interface to use, since in this interface, the material, and solution, moves with the spatial deformation. The变形的几何形状另一方面,界面意味着材料在通过空间转换时从域中添加和去除固体力学interfaces, which themselves compute a deformation of the solid material as defined on theMaterial框架。两者都无法解决固体力学and移动网格在同一域中。跟踪这一点的另一种方法是,这三个帧:
- 几何学框架坐标,默认
 ,固定在3D中的CAD几何形状中。
,固定在3D中的CAD几何形状中。 - Material框架坐标,默认
 ,固定在实心域中的材料中。之间的区别Materialand几何学框架坐标可能是由变形的几何形状or形状优化features in the model. The difference represents a different configuration of the material, i.e., effectively a different shape of solid objects.
,固定在实心域中的材料中。之间的区别Materialand几何学框架坐标可能是由变形的几何形状or形状优化features in the model. The difference represents a different configuration of the material, i.e., effectively a different shape of solid objects. - 空间框架坐标,默认
 ,固定在太空中。在空间andMaterial框架坐标可能是由移动网格功能或结构力学界面,控制空间框架。差异代表材料的位移。
,固定在太空中。在空间andMaterial框架坐标可能是由移动网格功能或结构力学界面,控制空间框架。差异代表材料的位移。
要验证用于制作地块的框架,请使用框架设置a数据集功能,如下屏幕截图所示。每个绘图组还可以在选定的帧中绘制数据集的边缘,如下所示。
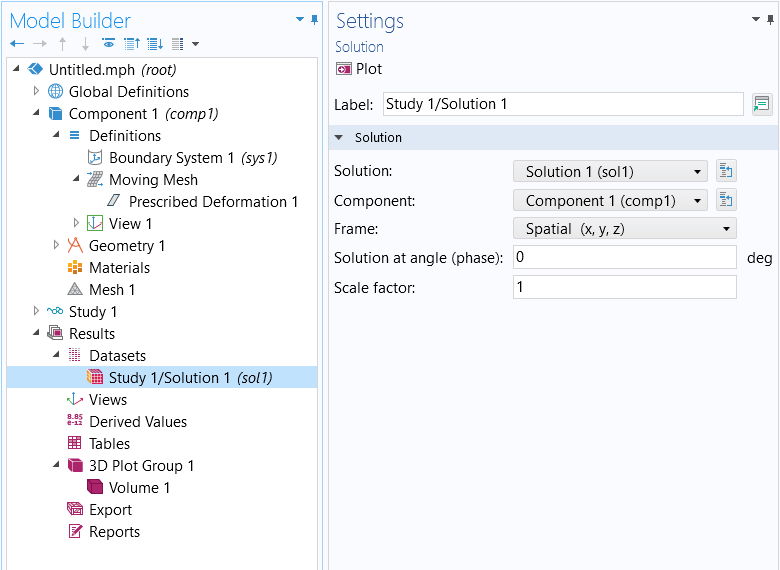
屏幕截图显示了如何选择用于绘制结果的帧。
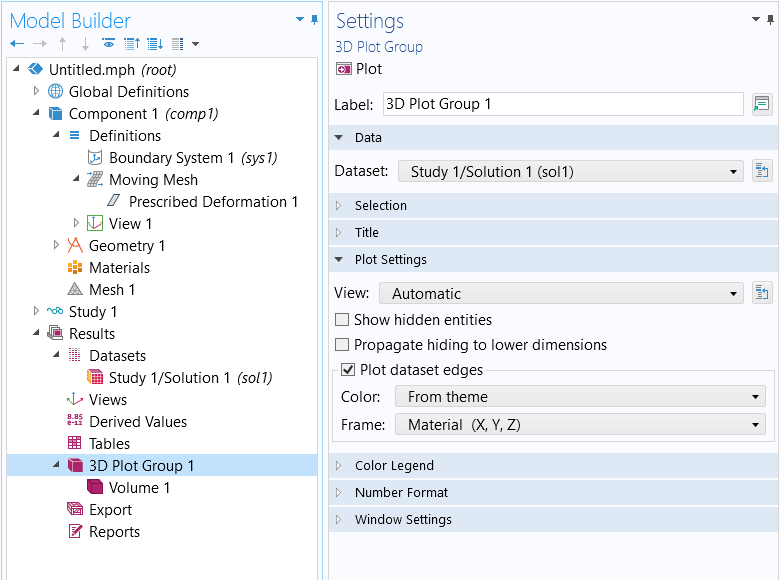
Within each plot group, it is also possible to plot the dataset edges, using different frames.
Modeling Translations
To model the translation of a domain, such as for the movement of a part in space, define the expression of a translation curve in space: 。在一个内使用这些表达式移动网格>规定的变形功能使该域内的每个点都偏移了其原始位置相同的数量。
。在一个内使用这些表达式移动网格>规定的变形功能使该域内的每个点都偏移了其原始位置相同的数量。
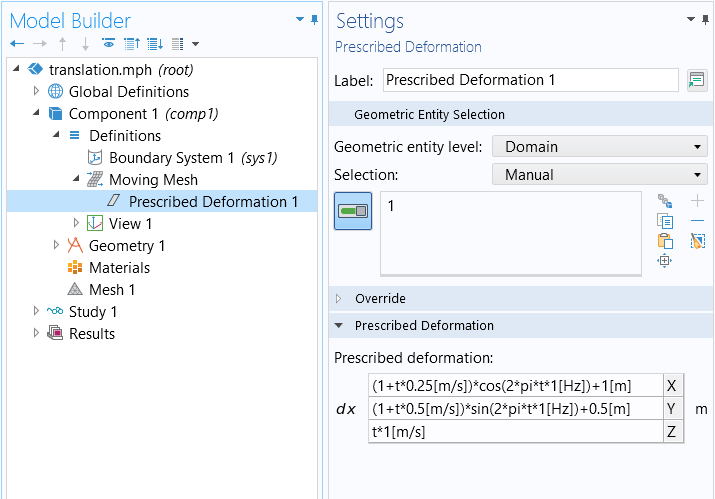
使用规定的变形实现翻译的功能。
例如,沿着平行于线的线中心的螺旋螺旋路径移动一个域z- 轴和偏移的原始位置,将这些表达式用于规定的变形:
dx =(1[m]+t*0.25[m/s])*cos(2*pi*t*1[Hz])+1[m]
dy =(1 [m]+t*0.5 [m/s])*sin(2*pi*t*t*1 [hz])+0.5 [m]
DZ =t*1 [m/s]
该翻译示例如上所述,并在练习文件中实现。
建模缩放与反思
为了建模有关全球笛卡尔坐标系的扩展或收缩的域,有必要定义一个比例因子矩阵和扩展点。比例因子矩阵, ,是一个对角线矩阵,其条目对应于缩放笛卡尔方向。例如:
,是一个对角线矩阵,其条目对应于缩放笛卡尔方向。例如:

will leave theX- 维度不变,缩放y-dimension up by two, and reduce thez- 偶数征服一半。
还必须定义范围缩放的点, ,这定义了域的变形场:
,这定义了域的变形场:

在哪里 是身份矩阵。
是身份矩阵。
因此,例如,通过上述比例因子矩阵缩放有关点1,2,3的零件,规定了:
dx =(1-1)*(X-1 [M])
dy =(2-1)*(Y-2[m])
DZ =(0.5-1)*(Z-3 [M])
也可以制作时间或其他模型参数的术语函数。练习文件中实现了一个示例。
建模旋转,缩放和翻译
Modeling of generalized rotation can become complex. Two cases are addressed here: rotation about a Cartesian axis, as well as a more general case of 3D rotation.
For rotations about one of the global Cartesian axes, it is sufficient to define a single rotation matrix, and the coordinate of the center of rotation. For example, consider rotating a part through an angle theta about a line parallel to thez-axis and passing through the point 。这rotation matrix about any line parallel to thez- 轴为:
。这rotation matrix about any line parallel to thez- 轴为:

并且,要旋转点,使用变形:

这等同于使用旋转域特征。练习文件中包含一个示例。
对于零件在空间中旋转和任意移动的更一般情况,需要在概念上定义两个坐标系统, and
and , at points
, at points and
and ,如下图所示。考虑第一个,,如零件。目的是旋转和移动零件以使零件坐标系与。
,如下图所示。考虑第一个,,如零件。目的是旋转和移动零件以使零件坐标系与。
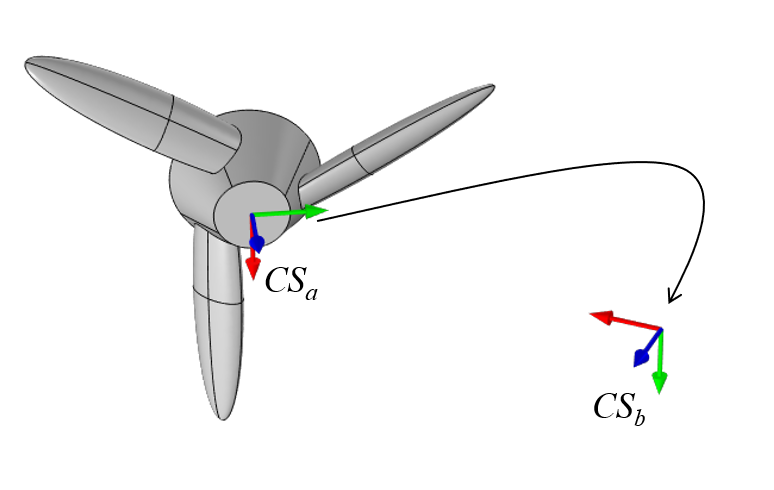
A part with a coordinate system that will be rotated and moved to align with a second coordinate system. The first, second, and third axes of these systems are shown in red, green, and blue, respectively.
两种坐标系都是根据两个正顺序向量定义的, 和
和 , with the third vector defined by the cross-product:
, with the third vector defined by the cross-product: 。这se vectors define a transformation matrix:
。这se vectors define a transformation matrix:

此转换矩阵将使零件从一个坐标系旋转到另一个坐标系。上述矩阵等同于施加旋转,该旋转将零件从进入全球笛卡尔CS。应该进行此旋转, and then, to rotate from the global Cartesian to并移至点, use the following expression for deformation:

也可以包括缩放。在坐标系,通过以下表达式使用组合缩放,旋转和翻译:

练习文件中的一个例子。
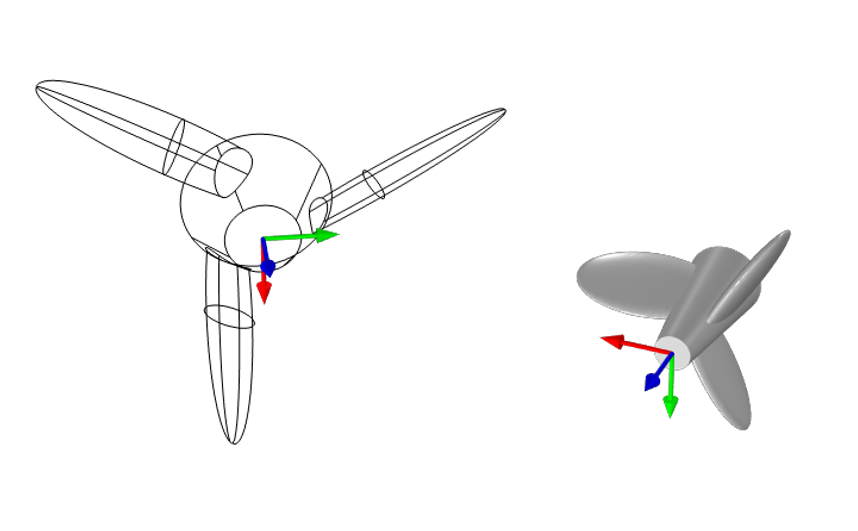
Translation and anisotropic scaling applied, as well as rotation, in terms of two coordinate systems. The original undeformed part is shown in wireframe.
提交有关此页面的反馈或联系支持。