

电机是现代工业社会的重要支柱。在不同类型的电机中,发电机和电动机等旋转机扮演着核心角色。这旋转机械,磁性Comsol多物理学中的物理接口专门用于建模这些系统。遵循我们探索如何建模旋转机械以及详细使用此功能的最佳实践。
旋转机器的几何形状
在任何旋转的磁性机器中,都有两个部分:定子和转子,由气隙隔开,使转子的旋转。这旋转机械,磁性界面使用移动网格方法对此旋转进行建模,因为有限元方法不支持旋转。
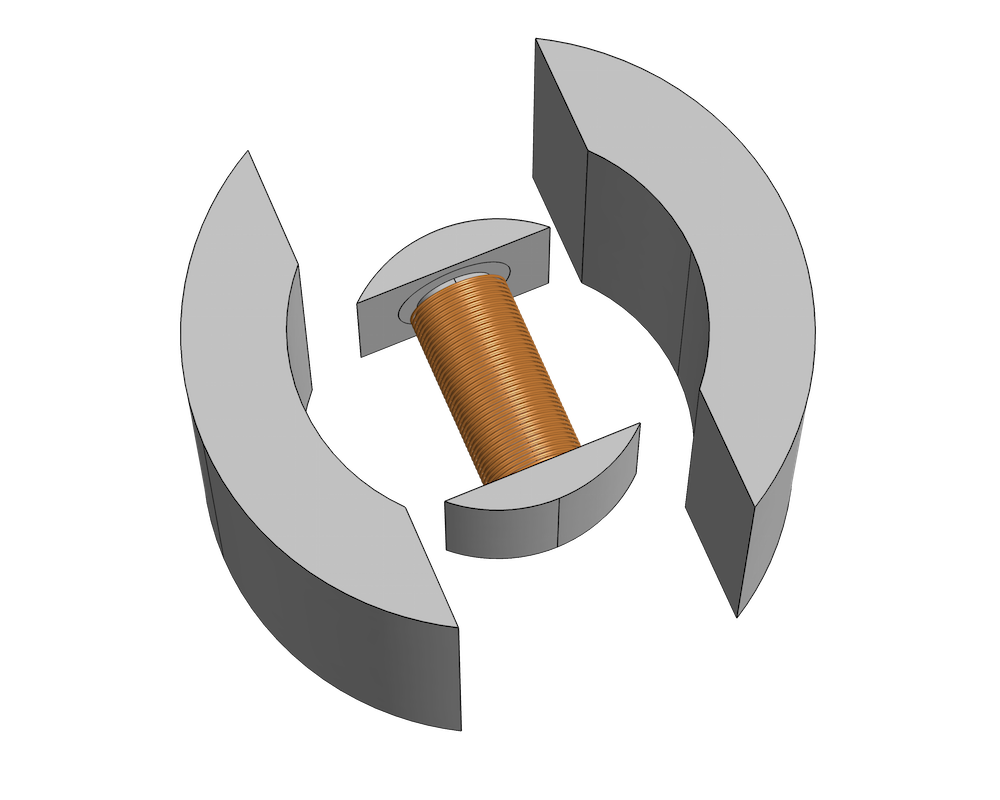
直流电动机的几何形状,其中包括两个永久磁铁和一个旋转绕组。
将机器的几何形状切成两部分(通常沿着气隙):一个包含定子,另一个包含转子。然后将两个部分分别分离。在模拟过程中,包含定子的零件保持静止,而包含转子移动的零件则保持静止。与相应网格的两个部分始终在切割边界处接触。

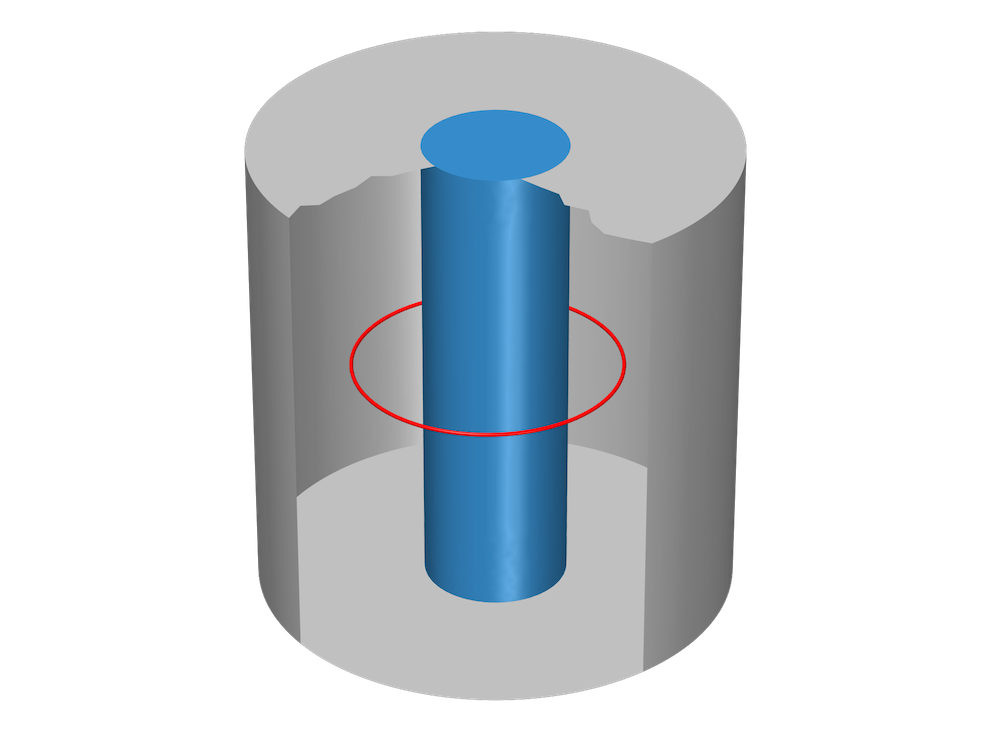
几何形状必须包括磁铁之间的空气区域。红色代表切割边界的可能选择。
默认情况下,几何序列中的最后一步是通过形成联合,将所有几何对象团结起来并将它们作为单个对象进行融合来确定。要分别隔离两个部分,必须通过形成组件来最终确定对象。使用工会和其他操作,为固定零件创建一个单个几何对象,另一个为旋转零件创建另一个几何对象。然后,选择表格组件在几何序列的最终确定节点中。在最终确定期间,在下面自动创建身份对定义,识别两个对象的共同(接触)边界。
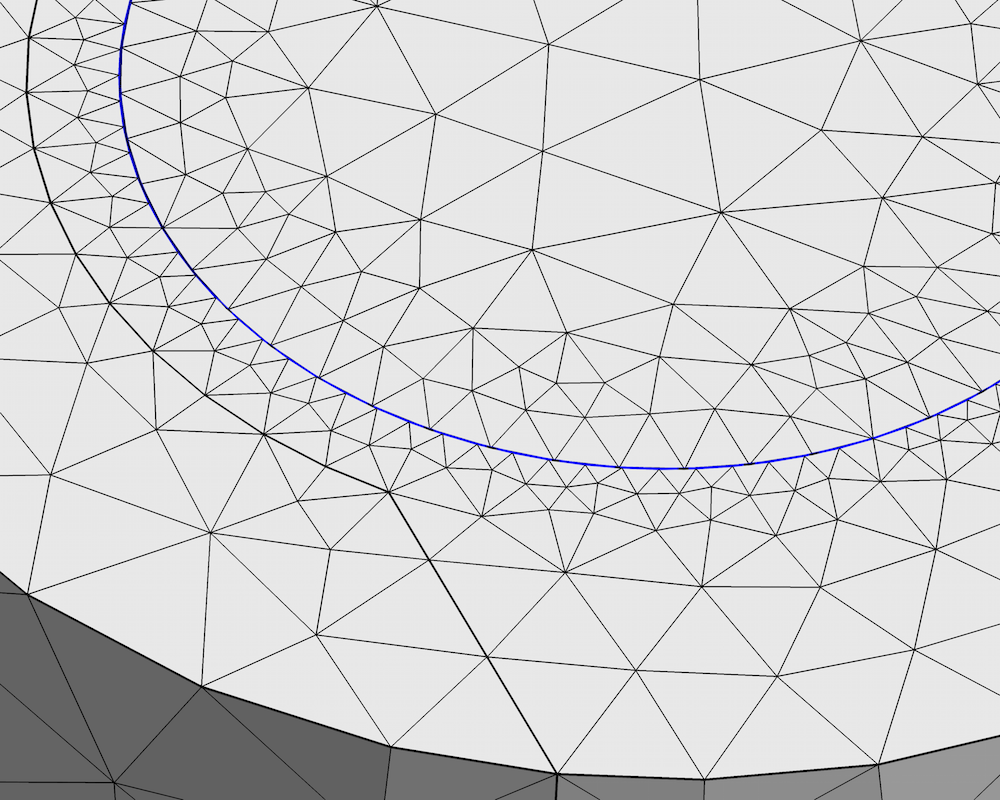
DC电机网眼的特写。旋转和固定部件分别啮合,如两侧的网格节点的不同位置所示。以蓝色突出显示的边界是在身份对中收集的。在旋转过程中,网眼相互滑动,保持在两对处的接触。
观看视频以了解更多有关在旋转机械模型中使用表单组件。
现在,我们可以使用旋转机械,磁性界面。使用规定的旋转指定旋转角度(可能是时间依赖)或规定的旋转速度输入恒定角速度的功能。在应用了这些功能之一之后,Comsol Multiphysics软件将使所选域的移动网格和电磁场的适当转换的设置。
规定的旋转或规定的旋转速度特征必须应用于包含转子的旋转部分。
削减会发生什么?从物理上讲,假设具有均匀的材料,电磁场在气隙中是连续的。与其他内部边界相反,磁场的连续性不会自动施加在两对之间。要执行此条件,请使用连续性对身份对的功能。
混合配方
这旋转机械,磁性界面求解麦克斯韦方程以计算电磁场的分布。一旦已知字段,就可以计算大多数感兴趣(例如,应用扭矩)。在时间依赖性分析中,该界面应用了绝对近似,该近似忽略了位移电流密度,或者等效地假设机器中的电容效应可忽略不计。通过这种近似,机器中的所有电流要么是外部应用的(即通过激发的绕组),要么是在机器导电部件中诱导的涡流。非导电部件(例如气隙)不会带有任何电流密度。
该界面中使用了两种方法来求解麦克斯韦的方程:矢量电势公式和标量电势配方。在以前的方法中,矢量领域,\ mathbf {a}(磁矢量电位),引入,该方法将磁通密度和电场定义为
\ Mathbf {e}&= - \ frac {\ partial \ mathbf {a}}} {\ partial t} \\
\ mathbf {b}&= \ nabla \ times \ times \ mathbf {a}
\ end {align}
有了这些定义,\ mathbf {b}和\ Mathbf {e}田野自动完成了麦克斯韦方程的两个方程:法拉第定律和磁性防护法(或磁性高斯定律)。这些都是这样写的:
\ nabla \ times \ mathbf {e}&= - \ frac {\ partial \ mathbf {b}}} {\ partial t} \\
\ nabla \ cdot \ mathbf {b}&= 0
\ end {align}
要解决的方程式是Ampère的定律:
向量电位公式用于磁场物理接口。
标量电势公式仅适用于电流密度为零的区域。在这种情况下,标量字段v_ \ textrm {m}(引入磁标量电势,不要与电势混淆),并将磁场定义为该电位的梯度。有了这个定义,Ampère的定律将自动实现,并解决了磁性通量保护定律。此公式用于磁场,没有电流物理接口。
与矢量电位配方相比,标量电势配方引入了较少的自由度,并导致“更容易”的问题要解决。当然,缺点是只能在没有电流的情况下使用。通常,这种情况将限制适用于特殊情况,例如永久磁铁的固定研究。但是,由于进行了准息近似,该公式也可以应用于时间依赖性分析中的非导电区域。
在3D模型的情况下,标量潜在方法提供了另一个重要优势。当与一对功能一起使用时,例如连续性功能,该配方可确保磁通量密度更准确地耦合,这是磁性机器建模内中心的数量。
这两个配方也可以通过将载体电势配方组合为导电或电流携带域的电势配方以及气隙和非导导域的标量电势配方。称为是混合配方,由于标量公式给出的对耦合的精度提高,因此在3D模型中特别有用。在2D模型中,对于平面磁场,用于向量电位的离散化方案与标量电势相似。因此,在2D内部情况下,使用混合配方是不需要的。
默认情况下,旋转机械,磁性接口应用Ampère的定律特征(即矢量电位公式)到所有域,因为它是最通用的公式。应用磁通量保护特征(将标量电位配方实现)到无当前的域,例如气隙和其他非导导区域,覆盖Ampère定律。适当的条件将在标量和矢量电位区域之间使用混合配方边界特征。请注意连续性对功能伴侣对两侧的两侧上的因变量,因此请确保两侧使用相同的公式。为了提高数值稳定性,量规固定A场功能可以应用于所有向量电位域,就像在磁场界面。
Ampère的定律功能仅适用于旋转部分的内部,那里有电流的绕组。请注意,所选区域小于整个旋转部分,该部分延伸到切割边界。为了提高精度,应在对条件附近使用标量电势公式。
使用混合配方非常简单明了,但请记住配方的数学背景及其局限性。适用性最重要的条件,最容易引起错误的条件是标量电势只能代表一个无关(弯曲的)磁场。在实践中,标量电势区域中无法完全包围(“链”)电流。
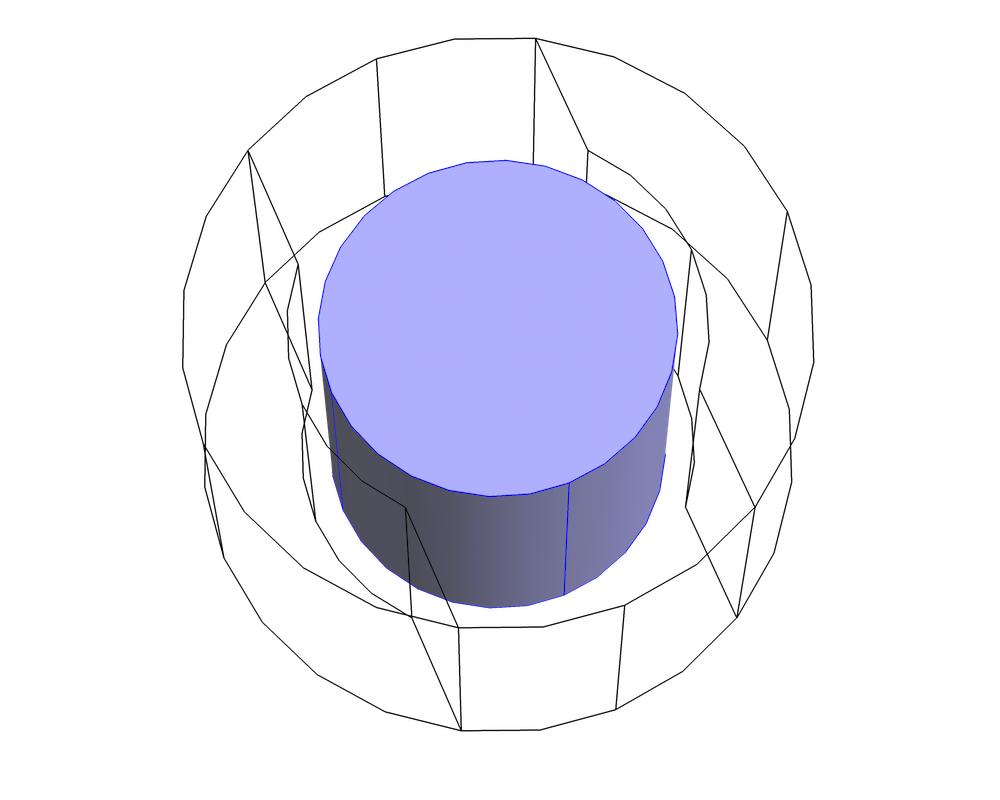
这种情况的原因来自标量电位的定义和麦克斯韦方程。在使用标量电势公式的区域中,沿封闭曲线的磁场的积分始终为零,因为该场是电势的梯度。同时,根据Ampère定律,我们知道沿封闭曲线的磁场的积分必须等于曲线链条的总电流。因此,除非链式电流完全为零,否则没有解决方案(不可能的构型)。如果我们尝试解决不尊重这种情况的问题,则该求解器将不会收敛。下图说明了这个概念,其中矢量电位区域以蓝色表示,标量电势区域以灰色为界。
标量电势区域中的封闭曲线“链”一个可以携带电流的矢量电位区域(电流返回路径位于几何形状的外部)。该模型可能没有解决方案。
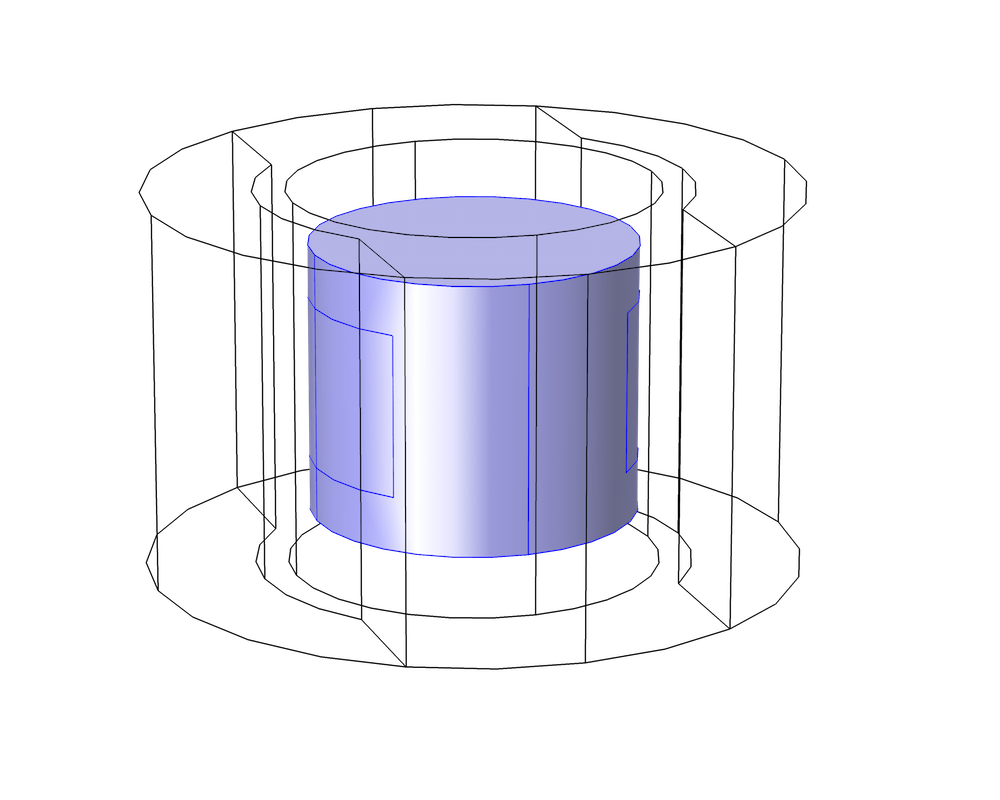
下面的数字代表了有效的几何形状,其中标量电势区域仅连接,这意味着它们没有矢量潜在的“孔”一直贯穿。


相对运动和帧
在旋转机器中,定子和转子的相对运动是机器操作的核心。涉及相对运动的身体的电磁问题并不是微不足道的 - 实际上,一百多年前,有关该主题的问题引发了相对论的发展。
通常,解决此类问题的第一步是在制定方程式时选择要使用的帧。一种框架仅仅是空间中每个点的坐标系和轴的选择。自然的选择是选择一个固定的笛卡尔坐标系,有时称为“实验室”框架并被称为空间框架在comsol多物理学中。在此框架中,固定部分是固定的,而旋转零件移动。
另一个可能的选择是在空间框架上的空间中的每个点上应用笛卡尔坐标系,但是让坐标系在旋转时遵循该点的运动。在此框架中,构成机器的材料始终是静止的(框架本身随之移动),因此框架称为材料框架。在机器的固定部分中,由于没有运动,因此空间和材料框架重合。同时,在旋转部分,材料框架相对于空间框架旋转。只要应用适当的转换,这两种框架选择都等效于它们提供相同的结果。
默认情况下,材料框架的坐标是大写字母(X,,,,y,,,,z),而空间框架的坐标为小写(X,,,,y,,,,z)。坐标的名称表示在特定框架中的矢量的组成部分;例如,电场组件是前任,,,,嗯,,,,EZ在空间框架和前任,,,,嗯,,,,EZ在材料框架中。
该问题是由物理框架中物理学自动提出和解决的。为了进行后处理,查看空间框架中的变量和磁场通常很有趣,因为这些变量和视野是观察者在静止方面相对于定子的数量。因此,物理学会自动转换并定义空间框架中的所有矢量场。如下图所示,括号中的框架在表达式列表中通过框架在表达列表中识别出空间和材料变量。
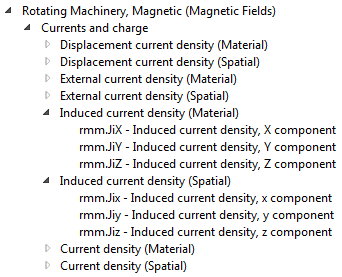
矢量数量是用空间框架和材料框架中的组件定义的。
当从材料转换为空间框架时,大多数矢量数量仅旋转,并且它们的规范是不变的。电磁场,尤其是电场,这是一个重要的例外,该电场根据洛伦兹的变换规则进行了转换。对于非递归速度,这两个帧中的字段与方程相关
\ Mathbf {b} _ \ textrm {材料}&= \ mathbf {b} _ \ textrm {spatial} \\
\ Mathbf {
\ end {align}
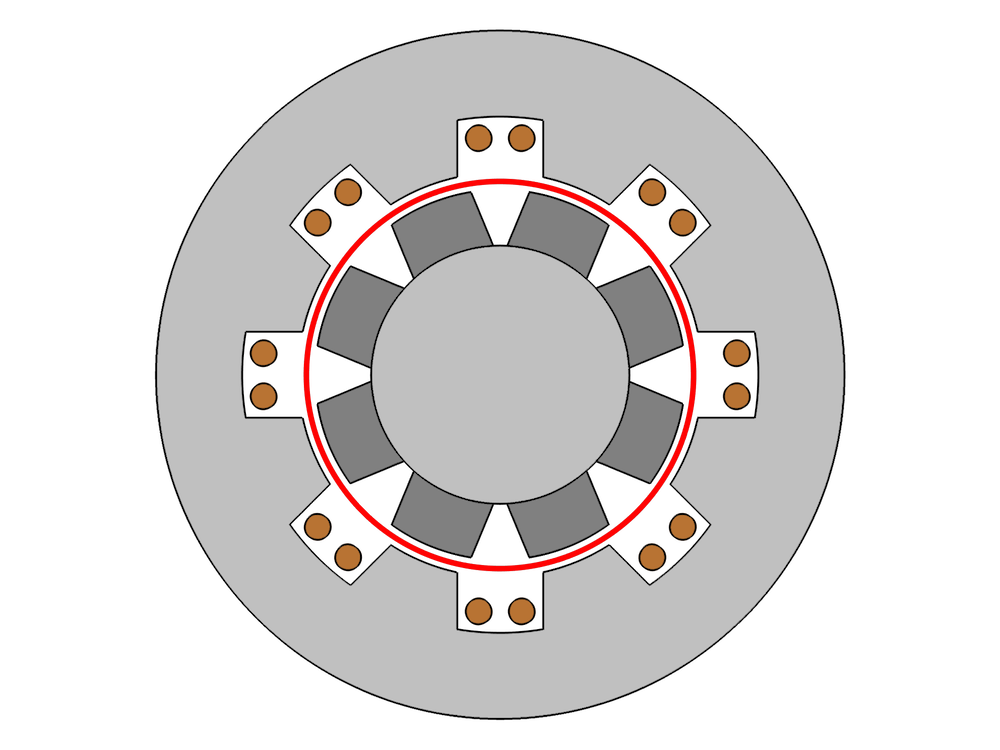
让我们从查看2D发电机的几何形状开始。在下图中,红线表示旋转和固定部分之间的分离。较深的域描绘了转子中的永久磁铁,而较轻的域表示可以饱和的铁,铜域代表发电机的绕组。白色区域识别出空气。
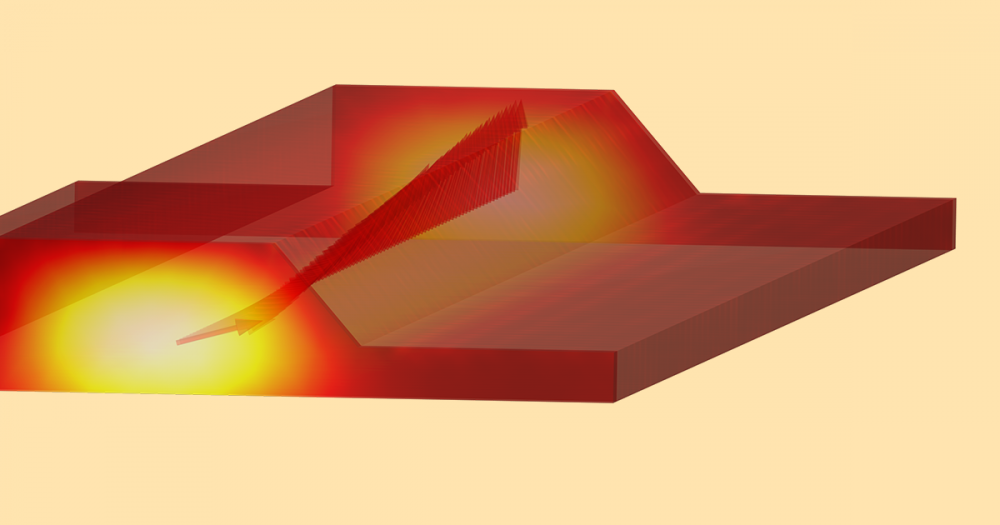
材料框架中的电场是导电材料“看到”的场,驱动电流密度。通常,它与空间框架中的电场不同,如下所示。


左:旋转期间(v/m)的空间框架中电场的平面外部成分。转子中的磁体相对于实验室框架中的观察者移动,因此有一个诱导的电场。右:材料框架中电场的平面成分(v/m)。由于磁体在旋转零件的框架中是固定的,因此没有明显的诱导电场。固定部分中的电场在材料框架和空间框架中相同。
设置求解器
求解器设置必须根据所需的模拟量身定制。一种固定研究可用于模拟旋转机在固定的固定条件下旋转机的行为,并且瞬时效应腐烂。相反,与时间相关步骤可用于研究旋转过程中发生的事情。
使用时与时间相关步骤,重要的是要指定与正在调查的物理情况相对应的正确初始值。如果这是研究的第一步,则该字段的初始值是从初始值功能(默认情况下,零)。另外,可以在与时间相关步骤以提供瞬态仿真的非零初始值。
通常,固定如果激发“已经活跃”(例如,发电机中的永久磁体),则添加步骤,而不是在瞬态分析开始时“打开”的激发。在具有两种激发的模型(例如DC通勤电动机)中,禁用负责固定步骤中瞬态激发的功能很重要 - 也就是说,如果仿真是在瞬态激发时设计的,则启用了模型行为。”。
概括
从本质上讲,旋转机械的建模可能是一个非常具有挑战性的。在这里,我们介绍了旋转磁机建模的一些概念以及在此有趣的应用中工作时要遵循的过程和最佳实践。这旋转机械,磁性接口和磁场构成功能核心的界面是分析和优化这些复杂系统的强大工具。
在未来的博客文章中,我们将探讨除这些技术外,除了这些技术之外,在3D中旋转机械建模中的作用。敬请关注!
进一步的步骤
编者注:我们在16年2月18日发表了有关此主题的后续博客文章。了解建模3D旋转机背后的关键概念这里。
评论(5)
埃德加·凯瑟(Edgar Kaiser)
2015年10月14日嗨,安德里亚,
我试图通过将非线性材料(低碳钢1117)分配给转子域(库中的铜),从模型库中修改rotating_machinery_3d_tutorial模型。
现在,该模型的行为有些奇怪。第一腮腺炎将分配因子提高到6多个,然后解决并产生明显的完全不正确的结果。
使用库模型尝试此操作的原因是,我必须用非线性材料在RMM中制作自己的3D模型,并且到目前为止,与类似的非库存失败。
在3D中将RMM与非线性材料一起应用RMM是否存在任何主要障碍?
谢谢
埃德加
Nirmal Paudel
2016年2月19日嗨,埃德加,
在此处查看有关在3D中旋转机械建模的新的后续博客:
//www.dvdachetez.com/blogs/guidelines-for-modeling-motating-machines-in-3d/
该博客还包括3D扇区几何形状中具有非线性磁性材料的模型文件。
希望这可以帮助。
最好的祝福,
Nirmal
Mamadou Diallo
2016年10月11日你好,
是否可以为此生成器2D和3D示例从头开始获取几何创建的教程部分,而不是导入已经制作的geometryo。
谢谢
安德里亚·法拉里奥(Andrea Ferrario)
2016年10月21日亲爱的马马杜,
请使用页面顶部的链接联系Comsol支持。他们很乐意为您提供帮助!
最好的祝福,
安德里亚
哈桑·巴蒂
2019年3月19日你好,
您如何计算此扭矩?
最好的祝福,
哈桑