

计算机辅助工程(CAE)可以帮助我们了解机械系统在物理实现之前的工作方式。为了正确反映现实,当我们模拟,验证或优化应用程序时,我们会不断增加建模复杂性。改进模型的一种简单技术是增加有限元素的数量,而这些元素的数量反过来又增加了更多的评估点。但是,硬件和仿真时间可能会限制模型的大小,而其他解决方案是必需的,例如子模型。
子建模的概念
很多时候,在数值模拟中,我们需要对大型结构进行建模,以便正确规定边界条件。但是,关键部分可能是本地的,并且仅占据模型的一小部分。在那些情况下子模型技术可能有用。
在子模型中,您首先分析整个模型的行为。选择网格,以便将边界条件和负载正确传输到整个模型。换句话说,现场变量,位移和温度应给出适当的结果全球,但是诸如菌株之类的衍生物可能不准确本地。
在第二步中,您将关键部分从全球模型中删除。削减应足够远离临界点,以便全球模型的结果提供良好的表示。下图显示了如何将轮辋进行划分的示例。左侧的全局模型中的红色矩形表示在子模型中重新分析的零件,右侧的子模型中的紫色表示切割全局模型的接口。

完整的型号和轮辋的子模型。
全局模型的结果是通过在切割接口上使用的字段变量来指定边界条件来规定子模型的。在comsol多物理学中,这是使用一般挤压操作员可以将结果从一个几何转移到另一几何。由于子模型是完整模型的一小部分,因此可以用更精细的网格对其进行建模,从而更好地解决关键部分。在最后一步中,针对与全局模型相同的负载案例解决了子模型。当然,可以在同一全局模型中拥有几个子模型。
轮辋的结构分析
几个CAD程序可用于生成几何形状,然后可以将其导入使用CAD Import模块或用于CAD的Livelink™产品之一。乐动体育app无法登录当您分析复杂的几何形状时,这种方法是强大的。复杂几何形状的一个很好的例子是轮辋模型在我们的模型画廊中。该模型包含许多细节,数值表示需要许多元素才能正确解决多个圆角处的应力梯度。借助子模型技术,可以在如此复杂的模型中捕获局部效果。
首先,您将对完整模型进行分析。由于并非所有细节都与精细的网格融合在一起,因此在本地,至少在应力方面,结果的精度较低。但是,在大多数轮辋中,几何形状相当光滑,结果令人满意。从对完整模型的分析中,在辐条和轮毂之间的轮辋背面的圆角和轮毂附着在车辆上的轮毂之间发现了最高应力。在子模型中进一步分析了这个关键部分。子模型从全局模型中切除,该块将封装临界点的块构成块,并且远离全局模型位移具有良好精度的临界点的边界。来自全局模型的解决方案是在切割边界上规定的,并使用临界圆角中的细网求解子模型。

冯·米塞斯(von Mises)在全球模型和子模型中应力的比较。全球模型低估了约20%的应力。
轮辋模型还展示了分析周期模型时如何减少溶液时间。轮辋可以分为五个周期性细胞,每个细胞都有辐条对。当车轮滚动时,负荷会在车轮周围传播。几何形状和负载中的这种周期性在子模型中使用。在全球模型中,仅模拟整个负载历史记录的1/5。这意味着Skoke Pair One经历了一个载荷,该负载在其中心和辐条对之间移动,而Skoke Pair两次经历了一个负载,该负载是在第一个前一个辐条对之间移动的负载和自己的中心。另一方面,Soke Paber三对载荷从第二个辐条对移动到前一个辐条对。通过将全局模型的结果通过双回路规定给子模型的结果来利用这一点。
首先,分析在辐条对数上进行循环,而在第二个实例中,分析在负载案例上进行了循环。对于每个辐条对编号,表达式一般挤压更改以使正确的辐条对的结果被规定为子模型上的边界条件。这很容易通过开处方纯粹的旋转来完成:
在哪里$ n $是讲话对数,$ u $和$ V $是位移和下标$ \ mathrm {s} $和$ \ mathrm {g} $表示子模型和全球模型。
本质上,这意味着子模型中的整个负载周期可以通过从不同的辐条中挑选结果,因为它们经历了不同的负载条件。
微电源组件中的热疲劳
微电源组件由几个部分组成,例如印刷电路板(PCB),焊接接头,电阻和芯片。焊接接头将芯片与PCB连接,并具有双重功能。一方面,它们将芯片固定在适当的位置,另一方面,它们为电流创建了连接。很少有材料具有令人满意的结构,热和电性能及其材料模型是高度非线性的。它们与蠕变或可塑性一起弹性变形。在非线性材料进行建模时,一个挑战是分析时间增加。除此之外,还需要几次迭代。必须为其他自由度(DOF)求解单独的方程式,代表每个整合点处的非弹性应变。在3D模型的情况下,除了弹性分析的3个位移DOF外,还使用了7个额外的DOF。此外,如果您正在处理多物理学应用程序,除了结构研究外,您还需要在模拟中包括热或电分析,额外的引入了DOF。
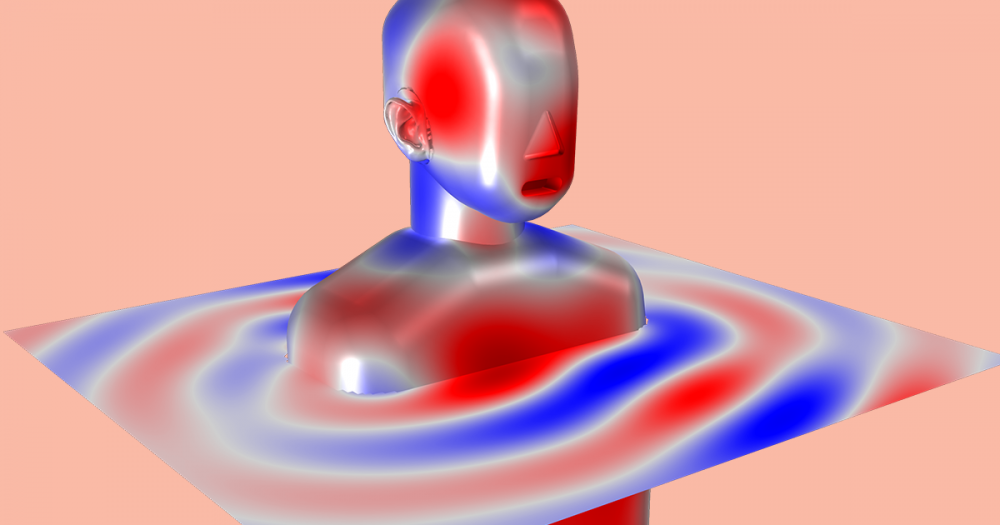
在粘塑料焊接接头中的热疲劳模型中,我们可以在我们的分步说明中获得模型画廊,将两个芯片连接到带有几个焊接接头的PCB。当电源打开时,芯片会产生热量,将其扩散到其余模型并流向周围环境中。由于电源不断打开和关闭,因此是否会担心芯片是否因热疲劳而失败。使用子模型技术模拟该应用程序,因为焊接接头的良好分辨率将提供一个非常大的模型。
首先,我们对完整模型进行了耦合的热机械分析。当用粗网格建模时,热结果也具有良好的精度,因为我们只需要温度场,而不是其衍生物。最初的结构分析将无法在焊接接头,尤其是在接头和周围材料之间的界面上提供足够的准确性。粗网格的选择将给出应力的准确性较低,并且粘塑性定律对应力具有非线性依赖性。使用焊接接头中的粗网格,从疲劳观点以识别关键的焊球。Darveaux模型(基于能量的模型)用于预测疲劳寿命。疲劳寿命预测的准确性不足以得出定量结论,但结果可用于识别关键点并在第二个子模型步骤中进行改进。

粘塑料焊接关节的疲劳寿命。红色的颜色代表短期疲劳寿命和蓝色的长期疲劳生活。关键的焊接接头位于球网阵列拐角处的较大芯片下方。所有四个角关节的寿命大致相同。
一旦确定了关键的焊接接头,就会创建子模型。子模型包含关键的焊接接头以及芯片和PCB的一部分。全球模型的结构结果是通过A规定的一般挤压在整个几何形状中进行切割的子模型边界。热结果通过热膨胀并在非线性材料模型中使用。这可以做到,因为全球模型的热结果具有足够的精度。以这种方式,初始多物理学分析被简化为单身的物理分析。最后,我们使用细网求解子模型,从而为关键组件中的应力和疲劳寿命提供准确的结果。

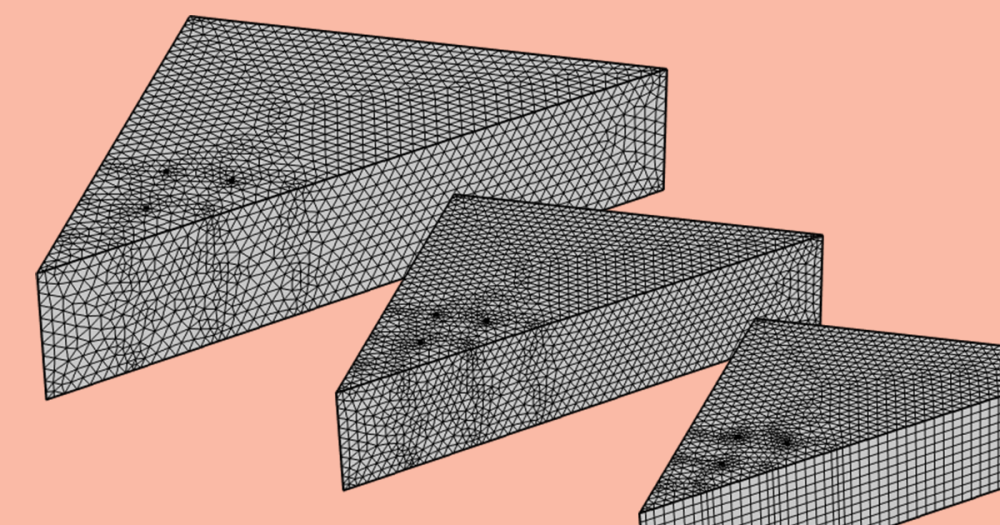
比较全球模型和子模型的网格。全球型号由300,000个DOF组成,而单个焊球的子模型由100,000 DOF组成。
子模型示例
我想与您分享两个子模型的示例。它们需要不同的产品,因此在不同的模块中找到。乐动体育app无法登录
- 这轮辋模型中的子模型,在结构力学模块的模型库中发现
- 这球网阵列模型中热疲劳的子模型,在疲劳模块的模型库中发现,还需要非线性结构材料模块

评论(3)
shashank tiwari
2018年6月19日你好:
我正在尝试使用“常规挤压”操作员进行子模型。我想知道是否有必要将关键部分从全球模型中删除以执行子模型?
我正在处理一个问题,其中全球模型只有三个域。我的子模型是一个气缸(全局模型中的域之一)。我在子模型中创建了此圆柱体(没有从全局模型中切出)(具有与全局模型相同的尺寸和材料属性),并使用“常规挤压操作员”将结果从全局模型转移到子模型。
我想知道这种方法是否正确,因为我没有从全球模型中“剪裁”这个圆柱体?
在定义“通用挤出操作员”时,我想知道我是否需要选择全局模型的所有三个域名,或者我应该只选择圆柱作为源,因为我没有在全局模型中执行任何剪切?
我期待听到您的评论。
谢谢,
沙沙克
HenrikSönnerlind
2018年6月20日嗨,沙沙克,
如何为子模型创建几何形状没有限制。它独立于全球模型。
至于挤出操作员的定义,无论您仅选择圆柱体还是所有三个域,都没有真正的关系。只要子模型边界适合挤压选择(也有公差),它将按预期工作。
问候,
亨里克
shashank tiwari
2018年6月20日嗨,亨里克:
非常感谢您的回复。这是一个很好的帮助。
沙沙克