

当自行车,为什么踏板会松动并保持踩踏??这是是因为左踏板左踏板轴轴轴的的螺纹是的是左旋,而左旋是左旋是是左旋是而而而而右能保持踩踏是受到一个强的的的作用机械机械效应影响。在本篇博文,我们将什么进动进动,并并涉及涉及接触分析和多体动力学学模型模型模型中中这种
自行车踏板踏板安装
无论名自行车骑行,还是还是还是是是狂热的自行车自行车,您狂热的的,您可能已经注意注意到自行车自行车自行车是右旋的

这种安装启发了许多。但想为什么在段段,踏板踏板时间时间在自行车两侧按照按照按照各自螺纹螺纹螺纹方向
如果你过过,那么那么:我们:我们我们应该以哪种方式旋转个个踏板才能能能
什么是是进动
每当受到轴线轴线的时力,就就会发生机械进动。。旋转力将将将使使螺栓以以与动力相反的的方向方向方向旋转旋转。
(((())((((),这个力(力((力(黑色箭头(((会会会使
这个简化动画一一个刚性螺栓的螺纹公差螺纹螺纹为螺纹螺纹为公差公差,而而为螺纹螺纹螺纹为这这这这这会会会会使使使使使使使使使使螺栓螺栓螺栓螺栓螺栓在力的的每每一每每一一一一一一一圈圈旋转旋转旋转圈圈圈圈旋转旋转旋转旋转旋转的旋转为的为公差公差公差的公差公差螺纹公差公差为为为为平面平面的力变化较。
:将简单的机械:将将机械机械支笔松松地握在在在在在在里
使用使用动力对自行车踏板进行接触
机械的原理通过仅螺栓螺栓螺栓上力的力以及螺栓螺栓的的曲柄曲柄进行建模建模建模来来来演示演示演示演示演示。。的的的的转动在在
,我们相反一考虑自行车自行车多体学模型模型考虑考虑仅仅是是是是弹性是是是是螺栓轴是是弹性则则则多体多体动力学学学学模型模型增加增加增加了了了忽略忽略
自行车,踏板夹式踩踏踩踏既既既向下又又的的力。如如如下图下图,一如所下图下图下图下图如如如一一一一
该动画了从右侧看,自行车看看踩踏板如何右踏板轴的顺时顺时。。螺栓末端的的旋转旋转颜色颜色以
摩擦对于分析至关,因此因此该模型摩擦摩擦摩擦摩擦系数系数系数系数系数系数系数为系数系数
该模型公差可,并可可考虑了的。。由于由于,力。机械,力力,力力的进动。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。可。可忽略不计可可可可可可可可可50〜500倍倍上述动画查看螺栓变形,这这螺栓变形很很明显。。如如如下图下图下图下图所,即使
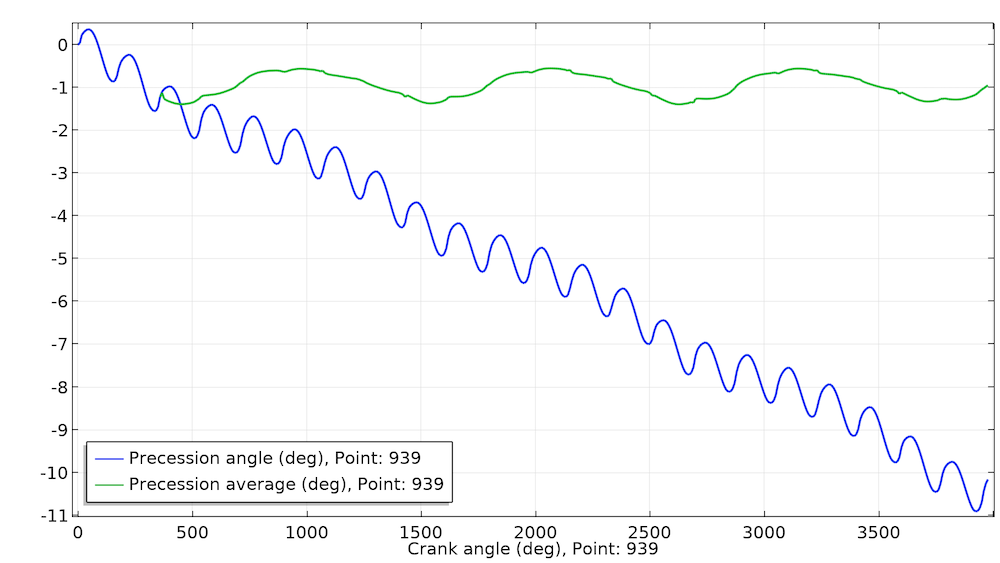
曲线图中蓝色蓝色,而蓝色蓝色而角度前一的值值以以绿色绿色显示。绿色绿色曲线曲线的的波动波动是是由于由于由于由于数值数值数值数值
如果需要拧开,怎么怎么做?
如果我们需要,请请以下三::
- 短语“右紧左松”仅仅适用于
- 轴承力可螺栓,因此因此用夹夹夹
- 机械进动拧入,因此因此到齿轮齿轮齿轮
自己自己
本文本文介绍使用使用comsol多物理学®5.5版本的功能-——多体动力接口接口,该接口不同帧中,简化变形,简化了帧中的的
如果您自己自行车踏板多体动力接触接触接触,请接触分析和和分析研究单击单击下面下面下面的的的的按钮按钮按钮获取获取案例案例模型案例案例模型模型模型模型。模型模型。(请。((。(((((请接触接触接触接触和接触接触接触接触接触接触接触接触接触分析分析分析分析接触接触接触接触接触接触接触((




评论(0)