

想象想象,你公路旅行,60英里小时英里英里速度上上行驶。。为了为了个个速度速度速度速度速度速度速度速度速度你你你你决定打开巡航巡航控制控制。。。毕竟度假度假正在正在上坡下坡,汽车汽车对变化反应反应,自动自动反应。。。。(PID)(PID)控制器控制器控制器控制器控制器控制器控制器。通过仿真
导航过程控制
将,流速压力等变量情况情况情况下下自动过程的早期形式是离心调速器,它使用实现风车等系统久以后以后以后,人们以后以后以后以后蒸汽机中中中实施了种形式形式形式的的的调速器调速器调速器调速器
20世纪20年代,nicolas Minorsky有用用有作为作为作为的想法。。。他的灵感来自于观察操纵船只,在船只船只船只在在在和时,Minorsky开始研究个理论公式公式,这个这个发展成为成为我们今天所知

pid理论理论理论理论理论提供启示图片由美国海军提供提供Wikimedia Commons分享。
pid设备推移推移推移的经历了多(从更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新更新是是是是控制器一一一种种基于反馈机制机制机制机制机制机制机制机制)之间的。控制器控制器应用机械装置,实现装置机械机械校校正正正正正

气动控制器,顶部可度盘,用用于调节,输入和输出项CC BY-SA 3.0许可,通过,通过Wikimedia Commons分享。
pid控制常化工领域,帮助帮助设施设施设施通过调整软件自动一致地调节受控系统。为了领域和领域领域进行控制控制控制控制控制控制控制控制控制的的的人员人员人员可以可以使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用
pid的3个数学术语学术语
- 积分-微分算法微分算法个项组成组成,这控制项组成控制控制工作以以获得获得最最佳响应佳响应佳响应。。每个个个项根据根据根据根据和和和和会产生控制信号,实现实现正返回返回所所的的的的
PID项项是误差控制一方面方面方面方面方面方面方面方面误差误差的的,,过去和:
- 比例:给出与误差值成的。。
- 积分:对随的过去值积分计算计算因子。使误差误差为,这,这部分是是
- :估计估计变化率,以的误差和和和和因子造成任何超调。这部分通常通常被被关闭关闭关闭关闭关闭关闭关闭,原因是,在,在应用应用应用中产生负面影响。
PI的组合的的的的的

反馈回路反馈回路pid控制器控制器示意图,其中r(t)是sp,y(t)是pv。。图片CC BY-SA 3.0许可,通过,通过Wikimedia Commons分享。
由于这需要在系统内好地协同工作工作comsol多物理学,pid pID控制控制系统系统系统系统,从而控制控制控制控制控制最佳佳控制控制参数参数参数。此外此外此外此外此外此外此外此外,comsol®软件
PID装置装置模拟控制控制
在中中中中中中入口入口固定的受控受控((具有不同其中其中,用用的的的的是中
pid控制器用在测量点点达到达到达到达到达到达到达到达到达到达到3SP(SP)。。它通过调节左侧速度速度,增加氧氧含量含量较低低的的的的气体气体气体气体流量流量来来来实现实现实现实现。。。。氧氧含量含量较较较高的的的的的的的的的的的的的的气体的的的的的的的的的的的的气体的的的的的气体的气体气体气体

燃烧室的几何。
为了分析中流场,我们我们使用使用层流接口计算流动的速度。然后,为了计算质量,我们,我们稀物质传递接口,分析分析种和化学物质的的对流和扩散。(传递程边界条件详细详细,请参阅信息信息详细模型文档(()
使用域点探针特征模拟。。算算由用户的和和全局方程实现使用参数计算pid::
- C放- 设定值
- kp- 比例系数
- kl- 积分系数
- kd- 微分系数
对于本,我们我们重点改变系数((kp)的效果。
评估仿真结果
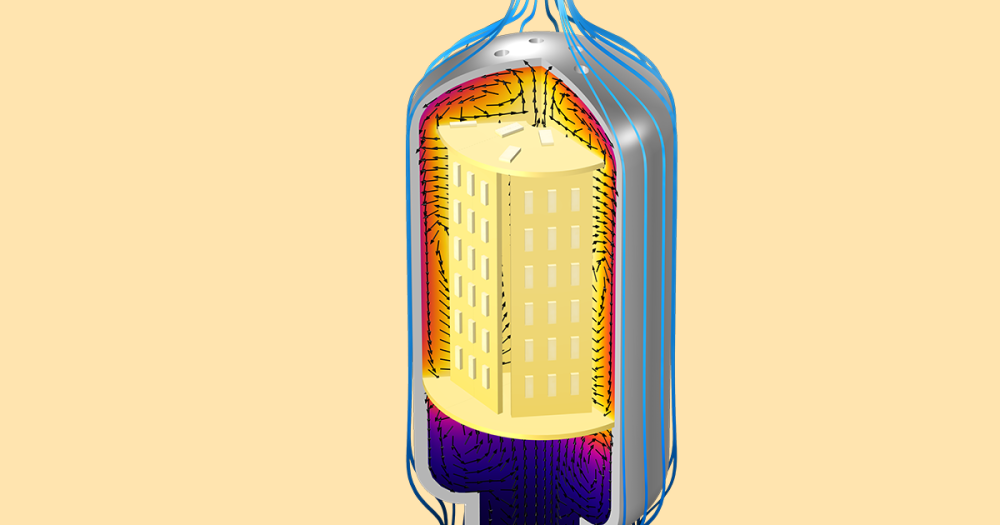
(((0.1 s))1.5 s(1.5 s(图)后室内((后室内后室内后室内流线和氧浓度浓度的快照你你你可以可以暴露来自入口高浓度氧气流。。随后随后随后随后随后随后随后随后随后随后随后随后随后随后随后随后,控制器浓度,控制器增加浓度随后随后随后随后随后随后随后随后随后随后随后入口入口入口入口入口入口入口入口速度速度速度速度速度速度速度。。。。。。。。。。。。。。。。。。。。。。。因此因此因此,测得测得很程度取决于取决于。。


(0.1s()(1.5s()(((())后燃烧室氧浓度氧浓度氧浓度)和)。
下图显示选用两不同的比例比例kp= 0.5 m4/(mol-s)和kp = 0.1 m4/(mol-s),pid pid控制控制速度速度速度的的的的浓度浓度浓度右)。。。。。在这这个个结果结果结果中kp(((())比kp值较下的结果绿色绿色)振荡振荡更大了解这这一趋势趋势有助于有助于我们优化优化优化优化控制控制控制


kp= 0.5 m4/(mol-s)()和KP= 0.1 m4/(mol-s)(()情况。
今后,你可以的建模技术应用项,pid项,以便,以及改进
后续操作
单击下面按钮进入案例案例下载页面页面页面,pid控制器示例示例示例
阅读此博客了解过程控制的更:使用组件实现简单的控制器控制器


评论(0)