
2006年3月22日上午,美国宇航局(NASA)启动了Space Technology 5 Mission。在大约三个月的时间里,微型卫星探索了地球的磁场,收集了高质量的测量。除了收集科学数据外,任务还代表了一个转折点。小型技术不是大型传统卫星任务,而是在太空探索方面优先。在这些系统中,MEMS技术可以作为主动热控制的手段。在多物理模拟的帮助下,进一步的改进已经形成。
太空勘探技术的发展
微型化的趋势是我们在包括手机和计算机在内的各种应用中都能看到的趋势。对于太空任务中使用的卫星的设计也可以这样说。NASA太空技术5(ST5)任务中使用的设备只是一个例子。
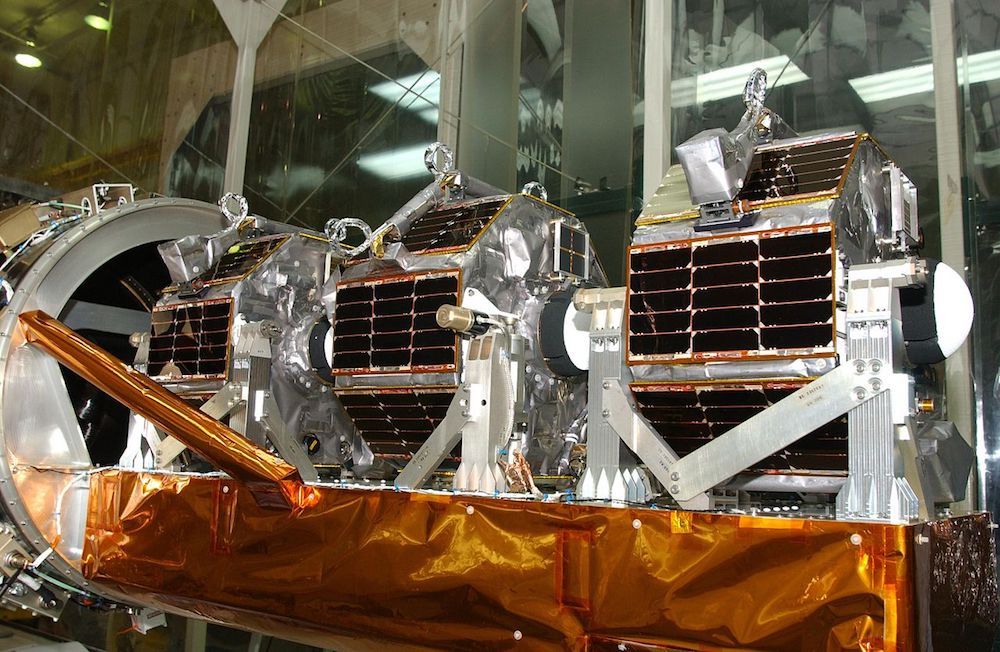
微卫星安装在ST5任务的有效载荷结构上。NASA的图像。通过公共领域许可Wikimedia Commons。
由于微卫星的有效载荷复杂性以及将其伸向地球轨道之外扩展的愿望 - 主动热控制非常重要。这种控制需要更多的功率,还增加了卫星的质量,并增加了零件。面临的挑战是设计一个可以满足这些功率和质量需求的热控制系统,同时仍以受控方式消除多余的热量。
考虑到这一点,NASA使用静电梳子驱动器进行了ST5任务。这些致动系统与两个不同的散热器设计配对:卢浮宫和一个快门配置。该任务有助于验证在热子系统中使用高压MEMS技术。
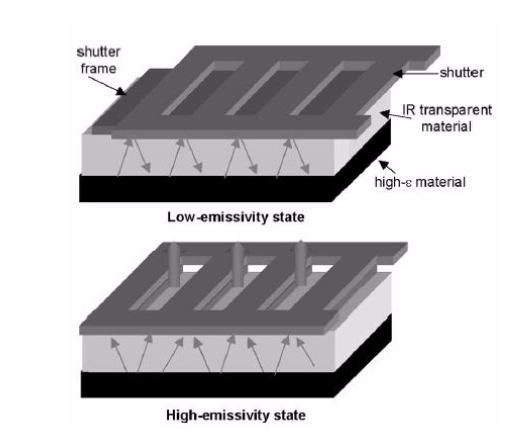
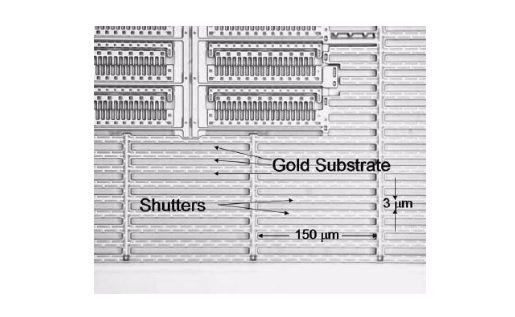
左:快门概念。右:快门散热器设计的光学显微镜图像。L. Pasqualetto Cassinis的图像,从他的乐动滚球app下载Comsol会议2016慕尼黑论文。
希望建立在这些初始发现的基础上,Tu Delft的研究人员认为使用静电梳驱动器的替代方法:热执行器。这些设备提供的位移相对较高,几乎没有施加的电压,并且对辐射的敏感性不如其静电对应物。为了验证其在此类应用中的潜力并进一步优化其设计,研究人员转向ComsolMultiphysics®软件。
验证在微卫星中使用热致动器的潜力
对于此分析,在Comsol多物理学中构建了两个模型。第一个是快门阵列的3D结构模型,这是基于其稳健性选择的配置。
3D快门阵列模型。L. Pasqualetto Cassinis的图像,从他的乐动滚球app下载Comsol会议2016慕尼黑演讲。
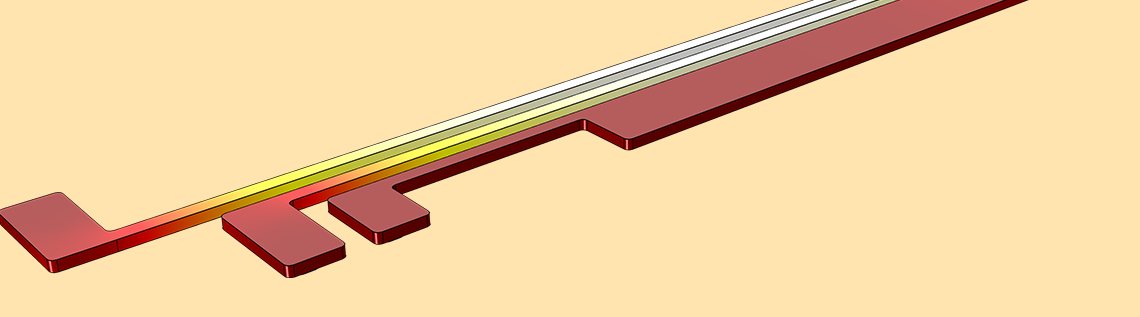
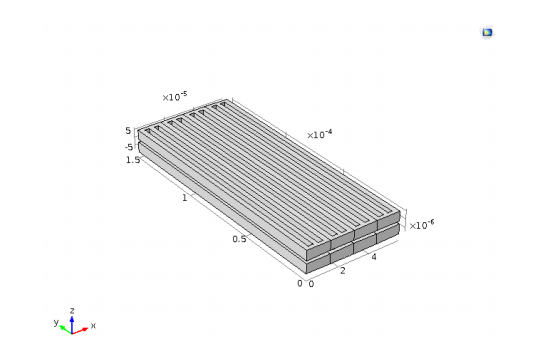
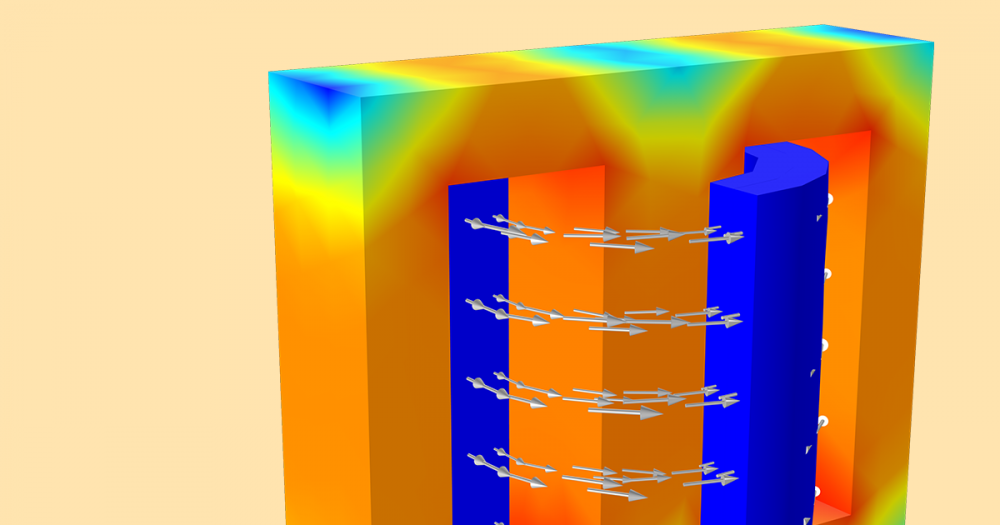
第二个是由多硅硅制成的两臂热执行器的3D多物理模型 - 基于该模型焦耳加热微型驱动器教程。施加的电压通过两个热臂产生电流,从而提高了执行器的温度。这种温度升高会导致热膨胀,从而导致执行器弯曲。除了这些热臂外,热执行器还包括一个冷臂,其间隙将两种类型分开。请注意,热臂的电阻比冷臂更大,因此更大焦耳加热。
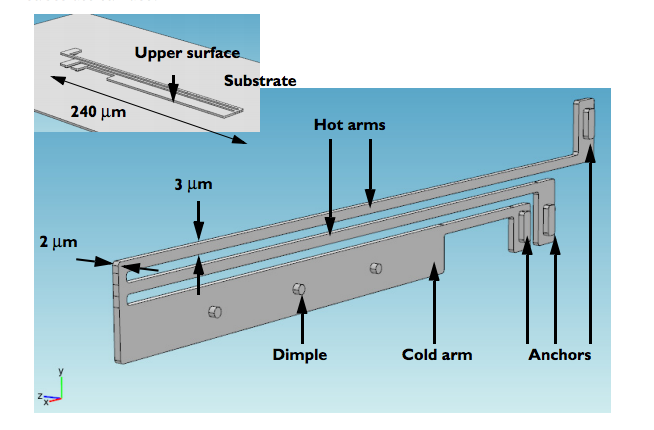
热执行器模型几何形状。此图像取自文档的焦耳加热微型驱动器教程。
为了验证热执行器模型,研究人员将仿真结果与分析结果进行了比较,并检查了输出位移是否接近3 µm的需求。在模型中,位移为2.54 µm,一个值与分析结果(2.11 µm)且接近所需位移相当的值。请注意,理论模型仅包含一个热臂,可以说明位移值的某些差异。此外,模拟显示了关于温度分布的一致性,而执行器的中心最高温度。
将类似弹簧的力添加到快门模型中以说明刚度。随着对设备的不同力,快门表现出弹性行为。通过研究获得的估计刚度被纳入热致动器模型中。当改变电压以通过致动评估尖端位移时,需要高电压来产生合理的位移。此外,正如预期的那样,最大位移发生在执行器的中心而不是尖端。
优化热执行器设计
在验证热执行器模型后,研究人员试图优化其配置。在这项优化研究中,执行器的长度与热臂和冷臂之间的差距变化。根据分析结果,两个变量都被认为对尖端位移产生了强大的影响。
在最初的优化研究中,2.7 V的施加电压产生的快门刚度为109N/m3和2.98 µm的位移。此外,设备达到的最高温度明显低于硅的熔化温度。
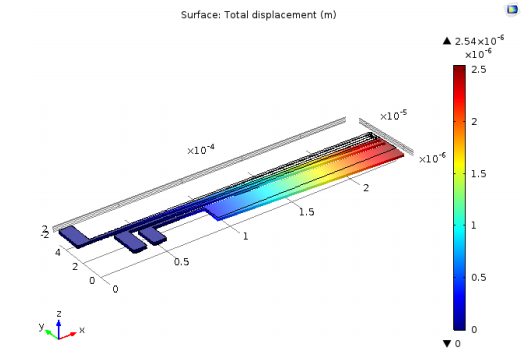
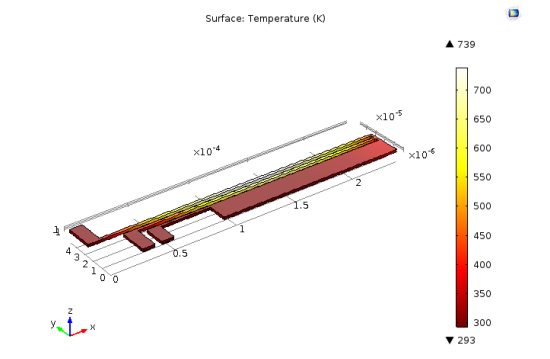
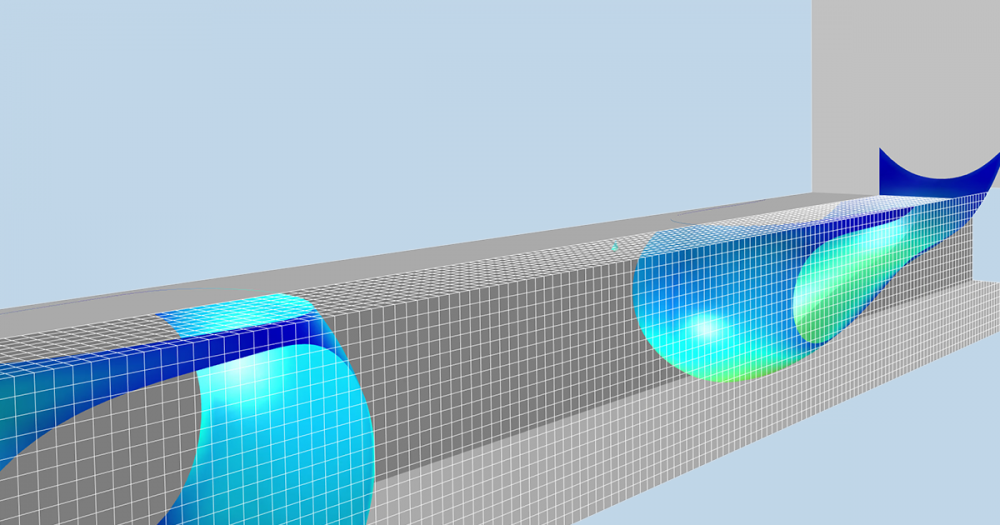
热执行器的位移(左)和温度(右),其施加电压为2.7 V.帕斯奎莱特·卡西尼(L. pasqualetto Cassinis)的图像,并取自他的2016年慕尼黑木马会议。乐动滚球app下载
降低所需的施加电压是后来优化研究的重点。例如,只有几伏至关重要的是Cubesats的应用(一种用于太空研究的微型卫星)的应用,而电源需求受到限制。对于本研究,考虑了多个客观变量,并且将臂之间的差距作为控制变量包括在内。使用这种方法,位移接近3 µm,并且施加的电压降低至约2.5V。
多物理模拟有助于将微卫星提升到新的高度
推进微型卫星的设计是扩展其在太空探索中使用的关键。正如我们在此热执行示例中强调的那样,仿真是测试这些系统中主动热控制技术的有用工具,从而提高了其安全性和覆盖范围。我们期待看到该技术将来将如何继续发展,以及模拟将扮演的潜在角色。
了解有关通过模拟推进太空探索的更多信息
- 阅读完整的Comsol会议论乐动滚球app下载文:“”MEMS可变发射辐射器的热致动器的可行性研究“
- 浏览与空间探索有关的其他博客主题:
- 下载相关教程:焦耳加热微腔剂
评论(0)