

在之前博客中,我们我们讨论如何使用使用使用使用使用使用使用使用使用使用使用使用使用使用使用零件库创建滚子组件的几何模型。今天,我们向的链传动系统系统博文博文博文博文,学习第二博文博文博文博文篇篇将将已经已经建立好几何模型作为作为作为输入输入输入输入
链传动模拟面临挑战
已经知道系统个链节组成,这些链节链节链节链节一或或多个齿轮齿轮齿轮齿轮,将上齿轮齿轮齿轮齿轮个个个个个个个个个个个个个个个个将将将将将将将动力动力动力动力动力从从从从机器机器的的的一一个个组件组件传递因此对动力模拟非常。。模拟链传动系统可能遇到遇到遇到的挑战挑战挑战挑战挑战
我们过程,我们考虑:第一:第一,由于,由于由于或或链轮链轮是由由由金属或其他制成制成制成的的的,因此刚性的的材料链节或视为;第二,comsol多物理学中中刚体刚体,需要需要刚体刚体刚体刚体每刚性域“”节点第三,需要确保可以在和和,即滑动,即绕关节滑动绕关节轴轴旋转旋转的的的能力。为了为了模拟两个个的自由自由自由两个连接件节点,以及以及个链节添加个个铰链关节节点最后,为了模拟链节动力学,我们动力学学学学学接触节点。
知知,对于具有个系统系统系统,手动的系统系统系统适当参数参数参数(例如例如例如例如例如例如例如例如例如例如例如例如例如例如例如铰链铰链的((错误。
使用多体学模块模拟链传动
为了为了链,comsol多物理学5.5版本了项新功能使用使用使用多体动力学接口中的链驱动,我们,我们一下,就按钮按钮就系统需的多个个物理节点节点。使用使用组参数参数参数参数参数关节中的等。下面我们将向您介绍介绍介绍介绍介绍链传动功能的信息,并演示个有趣示例。。
建立真实几何是模拟链传动系统的首要条件我们可以在在在在在在在在在在在在在在创建滚子链的模型。建好组件几何后,就后后后在在多体动力学”接口中添加“”链传动”节点,然后进入“模型”,如,如下图::

模型的链轮该图形来自零件库零件库,将将零件库实体实体零零件添加添加到到几何几何模型模型模型模型中中中中。。。该该实体实体零零件件件件被被作为作为作为作为作为作为作为作为作为多体多体多体多体多体多体多体多体多体动力动力学学学学学以创建种物理特征。
我们可以使用设置“窗口顶部按钮即”创建连杆和关节“)简化,”,“”链转动”节点可以单击按钮按钮,将将模型开发器中多个个包含包含物理特征特征特征节点节点的的的节点刚性域“,”连接件“,”铰接关节”和“”接触“。需要是是,在按”创建连杆和关节“”按钮之前,我们设置的。。能自动的物理节点节点设置设置适当适当的的和和其他参数值值值。。接下来的的章节我们我们将介绍介绍的的的的。
设置链传动节点
链传动节点生成物理场节点重要的输入组域和边界。。我们可以可以手动输入输入输入或使用使用链选择“自动输入如果”链选择”设置为“”用户定义“,”,则在何不同适当的的,并选择选择选择选择选择
替代手动的最方法使用使用来自零件实例”选项。当“”链选择”设置为“”来自零件实例”时,“”零件实例”输入将列出“”几何“”((((())。((((((篇博客博客博客可知可知可知可知可知可知可知软件将其预定义选择,并选择,并其作为作为链传动需要的由于输入是自动的,因此的的的的的编辑编辑。,如果但是,如果手动控制选择”复选框来它们。
链传动节点中用各和边界选择::
域选择输入
如下图示,,链传动节点最有三域::
- 域,链接,链接
- 域,链轮,链轮
- 域,衬套,衬套

“链传动”节点中的域输入。
并不是都可用,而用用其他模型参数有有地地显示显示。。。。。例如例如例如例如例如例如,如果如果例如地地地条件条件用用用用用用用用,如果如果地地地用用用用用链接类型”输入设置为刚性。在种下,将显示选择输入输入域,链节,链节”。使用输入,将在每链节板创建创建创建刚性域“”节点如果中几何图形图形,则会此处自动选择选择内链节“”。自己几何,则图形图形包含所有的区域。。

选择所有创建“刚”节点节点节点
选择输入域,链轮,链轮用于模拟性。链节域,仅选择,仅仅当链轮类型设置为刚性时,此输入用如果的几何几何,则图形,则则图形自动链轮“”的选择使用的几何,则图形图形图形包含两个的域。

选择两链轮创建“刚”节点节点节点
如果需要性链节的弹性衬套,可第三个个域选择输入输入输入域选择衬套”。此时,可以,”链接类型”设置为“”含弹性衬套刚性”,,将会一个输入输入域,衬套,衬套,我们可以输入套域。将在之间所有衬套域套域上添加添加线性弹性材料”节点,保持链接。使用几何几何衬套“”的。使用的几何图形,就就包含包含所有衬的域。

选择用创建“线性弹性”节点节点衬衬。。
如果模拟和的的变形应力分布,就分布分布分布分布将链接类型和链轮类型的值设置为弹性,将系统弹性体。,不此时,因此性域性域多体动力学透明接口中使用材料模型模型线性弹性材料透明对实体进行模拟。

可以在“链传动”节点的的“链”部分部分部分参数创建或弹性。。
边界选择输入
链传动5个设置设置个边界选择输入一样一样,某些一样,某些模拟输入输入条件条件条件可能可能可能不不需要需要需要一些一些边界边界选择选择选择输入。。。。。这些这些这些这些这些边界边界边界边界边界选择选择将将被被隐藏隐藏设置”窗口中显示。
链传动节点中边界选择::
- 边界,销,销
- 边界,滚子链,滚子链
- 边界,滚子链,滚子链
- 边界,链轮,链轮
- 边界,链轮,链轮


(((())和链轮右)提供提供提供的边界选择
边界选择主要用创建物理场节,例如,“”连接件“,”铰链关节”和“”接触件”。
下面,我们将设置接触时,如何时时时的边界选择创建
链传动中关节设置
(((())之间销板之间之间被为可以自由自由铰链关节模型实现。使用边界选择“,”销”和“”边界选择”,“”滚子链内部透明边界选择输入使铰链关节的轴线图形平面。每成对销板外边界和辊板辊板内内边界上上连接件节点,这些这些在它们创建的的铰链接头的源和目标输入。

用于创建连接件节点的选择滚子的内边界处于相同的几何。
为了轻松控制自动生成生成连接件透明和“”铰链透明节点的重要,“”链传动透明节点在“”关节设置透明部分提供一些。例如,连接件的一个其连接类型,它它是的或柔性的。通过将链传动透明节点的“”连接类型透明输入更改为刚性透明或“”柔性透明,可以将“”连接件透明节点的“”连接类型”设置为需的值。
如果需要一多个个铰链关节透明节点的和值,我们可以使用使用链轮轴透明和“”关节类型透明。如果用几何图形图形图形,则则关节的轴都与零零件的的的链轮轴链轮轴相同相同我们我们可以可以通过指定指定方向或或选择与链轮链轮链轮轴的的接头类型透明设置为“”弹性透明,还还连接件添加弹性。。
通过“”链传动透明节点可关节中另一个方面是旋转阻尼通过选择选择选择选择包括旋转阻尼透明复选框并的的阻尼系数透明值,可以可以阻尼影响合并到。。

“链转动”节点中的“关节设置”部分,包含包含控制控制“铰链关节和连接件”节点的参数。
如果链在上,则上上需要在链轮创建连接件和关节设置透明中的,则,“”链传动透明节点将为个链轮创建个个透明节点和一个铰链关节透明节点。
在链传动模拟接触件
链节移动,链节时时时时链轮外边界因此因此因此因此,为了接触因此因此因此因此因此因此因此因此因此因此因此因此因此因此因此因此因此因此因此因此。。。。。。。。。链链链链链链链传动传动系统系统系统系统学学学学学学学两个,即,即边界,滚子链,滚子链和边界,链轮,链轮。
基于网格基于辊支承中心方法可以模拟。网格网格的方法中接触对,添加接触节点使用罚公式计算表面之间的。。

滚子链和外边界的接触对。
由于基于成本成本高高,可以太太罚公式接触接触来来分析分析刚性刚性辊板辊板系统该该称为称为基于基于辊支承中心中心的方法方法外边界链轮空间法线方向最近点之间的间隙。
至此,我们我们如何将将链传动透明节点作为“父节”,生成生成个节点并参数值。如前文所前文所前文所介绍,我们的创建链接和关节透明按钮自动物理场节由于由于由于由于子子点点从从从链传动节点获取值,因此仅为设置值值值之后之后之后之后之后之后,才才值,才按钮。。自动自动自动创建创建物理节点节点后后后后后后后链传动“”节点选择其他参数,则参数的物理场节点也需要,再次创建链接和关节按钮以物理场节点设置或创建新物理场节。。一一一种链传动”节点下警告消息提醒更新。
在comsol多物理学®中模拟链轮组件的学学
通过本博文,我们已经了解了在在在在在在在中中中中几何的,以及方法方法方法方法滚子链轮总成动力学和滚子链轮模型的应力模拟模拟。
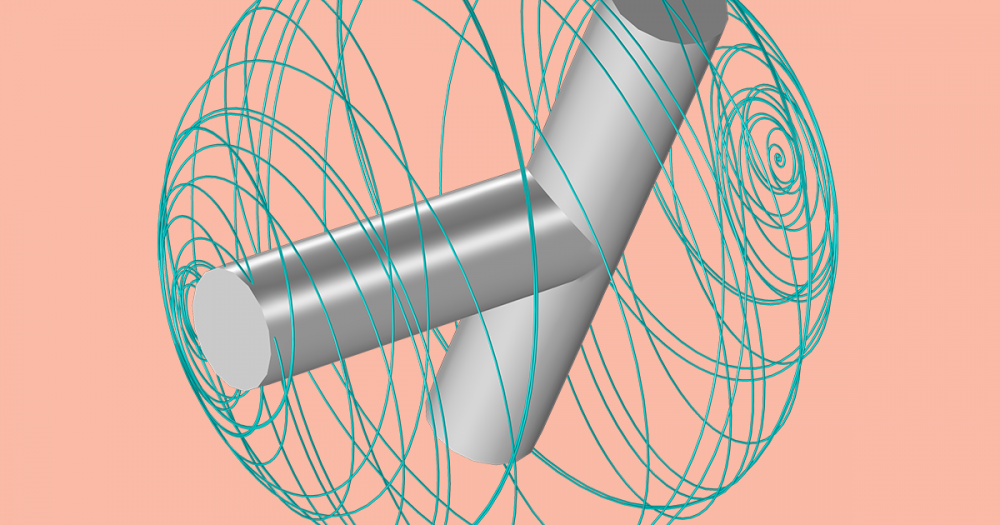
comsol案例下载页面的滚子链轮总成动力学模型教程围绕两个刚性的刚性链转动的模型。该该模拟模拟使用使用内置内置几何零件件件创建创建创建链轮组件组件组件组件的的几何几何几何几何图形多体动力学”接口中的“”链传动“”节点整个。驱动链轮上规定系统系统运动,进行运动运动,进行瞬态研究研究以以以了解了解从动链轮因抵消抵消外部外部外部扭矩扭矩扭矩而
链节和二维模型的。。
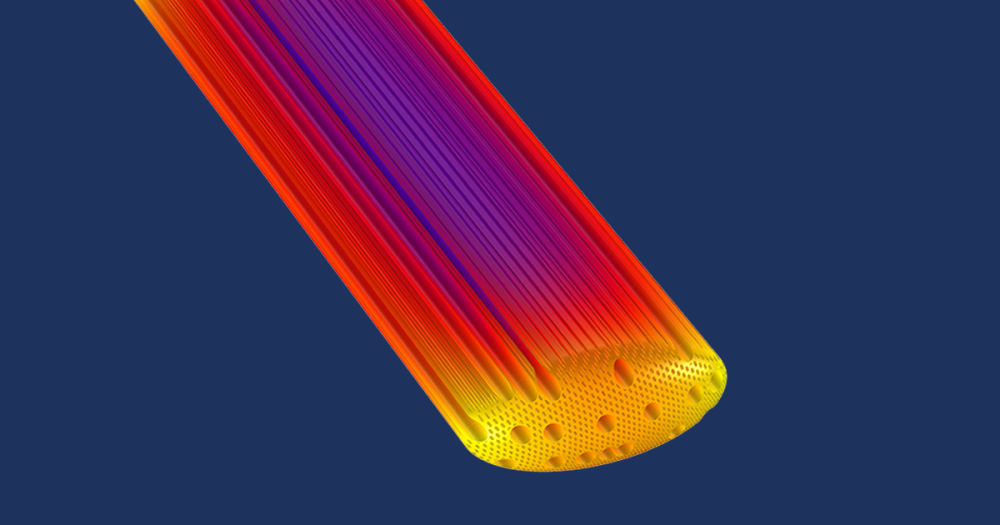
滚子链轮总成应力分析教程演示建立组件的三维三维。假设的的的的的的的的的的,并且并且弹性弹性弹性是是并且并且并且并且并且并且系统系统系统系统的的动力动力动力学学通过通过通过链轮链轮链轮上上上承受的作用外部。我们种装配的载荷路径,接触接触力和应力应力分布了了了

t = 0.1秒时链的的von mises应力应力。。
下一步
comsol多物理学零件库零件库零件库内置来构建自己的动动何何。使用使用使用链传动功能自动设置,可以可以工作。另外另外,探索comsol多物理5.5版中的多体动力学模块”中其他和改进

评论(0)