用预定义的耦合手动定义多物理模型
在定义多物理模型的物理时,您可能需要使用一个增量策略,其中一次包括一个单个物理接口,然后手动添加所有预定义的多物理耦合。在comsol多物理学中®,我们将此模拟策略称为使用预定义联轴器的手动方法。这与全自动方法,涉及自动实施,与用用户定义的耦合的手动方法,其中涉及更多的手动实施。在本文中,我们将用预定义的耦合来解释手动方法,并进一步详细说明其使用。
何时将手动方法与预定义的耦合使用
多物理模型中描述的每种物理现象都可能包含复杂的工作条件,材料特性,初始条件和边界条件。这些必须在模型中包含的每个物理接口的物理设置中定义。
为了控制建模过程的每个步骤,一次引入一种物理现象可能是很好的,并检查每个添加现象的结果。这种连续的自举策略使您有一个更好的机会在您对问题的提出并输入comsol Multiphysics中的设置中遇到任何错误®用户界面(UI)。此外,每次您要检查一个物理接口之一的公式或输入是否正确时,请求解完整的多物理模型方程,这可能非常耗时且计算昂贵。使用这种方法使您可以检查和验证每种物理的实现和结果。
使用预定义联轴器的手动方法就是这种策略。一次添加单个物理接口,并在添加更多耦合物理接口时手动添加预定义的多物理耦合。因此,您正在建立完整的多物理模型。随着您正在努力提高复杂性并涉及更多物理界面的模型,这种顺序策略变得越来越有用。下面解释了用于采用该方法的逻辑以及实施该方法的步骤。
 母线的模型,显示了彩虹中多层图中的电势。
母线的模型,显示了彩虹中多层图中的电势。
 母线的模型显示传热和电磁加热,以红色 - 白色颜色梯度加热其表面。
母线的模型显示传热和电磁加热,以红色 - 白色颜色梯度加热其表面。
实施该方法的程序
手动方法中的步骤顺序涉及添加,设置和计算模型中物理接口的组成物理接口或组合的解决方案。然后重复该过程,直到完成所有物理接口和多物理耦合的设置为止。
顺序建模策略的目的是将模型构建过程划分以使其更容易。因此,使用顺序方法的过程的一般概述如下:
- 添加物理接口
- 定义物理设置
- 定义多物理耦合(仅在添加多个物理接口时可用)
- 打开添加多物理学窗户
- 添加适当的多物理耦合以结合参与物理界面
- 为多物理模型添加单独的研究
- 计算研究
- 检查结果
- 重复步骤1-4,以便每种物理的组合
一旦模型组件包含多个物理接口,就可以添加多物理耦合。此时,多物理学节点自动出现在模型树中。通过此节点或相应的按钮物理功能区选项卡,您可以提示添加多物理学出现的窗口。打开时,您可以选择或取消选择哪些物理界面。根据您选择夫妇的物理接口的组合,将提供不同的多物理耦合(如下图所示)。至少,至少需要选择两个物理接口,以使多物理耦合选项出现在添加多物理学窗户。
 3个并排屏幕截图显示您可以在模型中实现的添加多物理窗口和不同的多物理耦合。
3个并排屏幕截图显示您可以在模型中实现的添加多物理窗口和不同的多物理耦合。使用添加多物理学窗口以在各个物理接口之间实现多物理耦合。请注意,根据所选物理接口的组合可用不同的耦合。
在另一篇文章中讨论全自动方法为了定义多物理模型,讨论的一个值得注意的好处是,自动处理模型中物理接口的最佳研究和求解器设置。这添加多物理学窗口为您提供与您一对一手动添加物理接口时相同的好处。当通过这些手段将多物理耦合添加到模型组件中时,该软件会自动调整每个参与物理接口的设置。这使您仍然可以利用该功能,即使您不使用全自动方法。
在下面,我们证明了该方法的使用,并将其用作我们的多物理示例。
演练示例:建模电阻加热和热膨胀
为了证明使用该方法,我们可以重新审视该方法的热电学机械(“ TEM”)版本热显微驾驶员教程模型,在应用程序库中找到的多物理学部分comsol多物理学文件夹。假定除物理设置外,有关模型设置的所有详细信息已经完成,我们将专门专门针对定义模型中的多物理耦合。
由于我们采用了顺序策略,因此我们首先需要确定单独分析的顺序。在微型腔内,在两个热臂的锚点上施加电势。当电流流过热臂时,电阻加热会加热它们,从而导致热膨胀。冷臂不会扩展到相同的程度,这导致变形,负面y指导,执行器。
这意味着该过程始于电势,继续持续诱导的电流导致温度升高,进而导致结构变形。物理现象的自然顺序决定了分析的顺序:
- 进行电气分析
- 进行电热分析
- 求解完整多物理模型的方程,该模型解释了电,热和结构效应
但是,应该指出的是,通常,当使用这种方法时,我们可以按任何顺序添加和定义物理接口。在这种情况下,只有一个特定顺序是有道理的,因为在没有电流的情况下计算热模型只会给出均匀的温度场。如果没有变化的温度场,执行器就不会移动,进行结构分析毫无意义。现在,让我们潜入以上计划实施顺序方法。
电气分析
对于电气分析,我们首先添加电流与模型组件的接口并通过添加边界条件来定义物理设置。然后,使用先前添加的固定研究,我们计算并获得了微隔腔电位的结果。
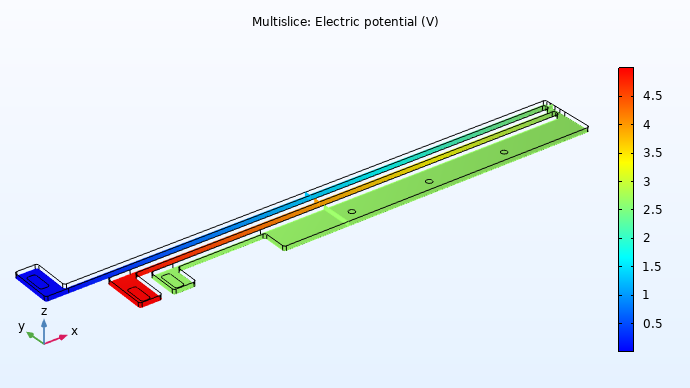
电势结果图,用于对微导液的电分析。
在计算了第一个单物理模型的研究之后,我们要验证结果是否准确。如果是,我们可以继续进行第二项研究,即电热分析。如果不是,那么我们将花点时间跟踪和纠正模型中的任何故障。如上所述,结果显示了整个设备的电势范围为0-5伏,在中间热臂的锚点处观察到最高的电流,而在长热臂的锚点处最低。这些结果与我们定义物理学的方式一致,并且是我们期望的,因为将5伏的电势施加到中间热臂的锚固杆上,并在长热臂的锚固端被接地,而所有其他表面都被电气绝缘。
电热分析
在确认了对微型驱动器的电气分析的结果之后,我们可以向前移动并重复此过程,以进行设备的电热分析。为了保持结果,最好使用多个研究。我们在模型组件中添加了一项新的固定研究,使用该研究来解决电动和传热界面方程。为此,我们添加固体中的传热与模型组件的接口。再次,我们添加了定义微腔内传热所需的物理节点。此后,我们需要实现多物理耦合以促进物理界面。为此,我们可以打开添加多物理学窗口,选择两个要耦合的物理界面,仅选择第二项研究解决列,选择焦耳加热,然后将其添加到组件中。
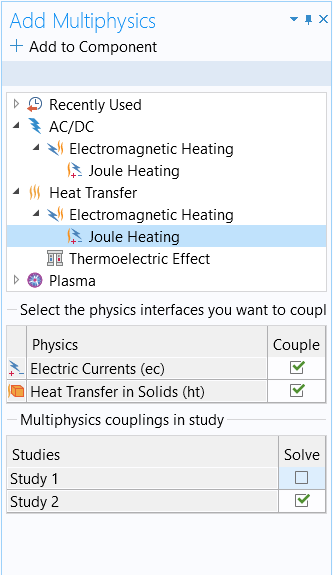
这添加多物理学如上所述,带有电流分析的选择。
现在,我们可以计算模型组件中的第二项研究。求解后,我们提供了温度和等温轮廓图,显示了微腔内的温度分布。
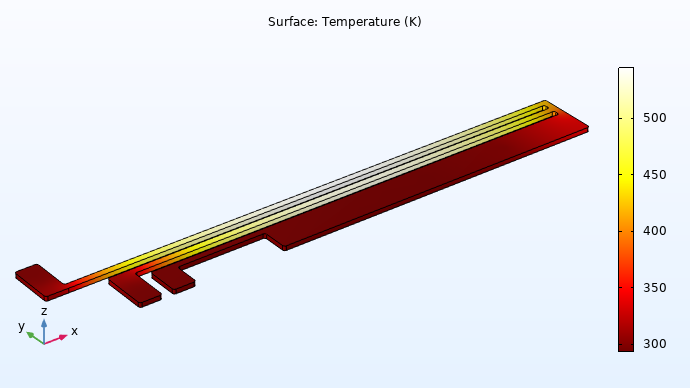
温度图,用于对微导液的电流分析。
再次,我们检查结果。如果它们是准确的,并且模型的行为正如我们期望的那样,我们可以继续进行。在这里,两个热臂之间观察到最高温度。当我们向热臂或冷臂的锚移动时,温度升高(如果有的话)。这些结果是合适的,因为两个热臂之间的电势是通过电阻损失产生的,其中热量是通过电阻产生的。执行器还通过薄空层在所有边界上进行对流冷却,从而降低了接近环境温度的温度。
电 - 热结构分析
在这一点上,我们发展到包含结构效应的完整多物理模型。让我们从添加固体力学接口作为模型组件中的第三个物理接口。接下来,我们需要添加一项新的固定研究,其中所有三个物理界面都被选择用于解决。在此之后,我们实现了夫妇传热和固体力学所必需的多物理效应。我们通过打开添加多物理学窗口,选择两个各自的物理接口,然后选择热应力,固体多物理耦合。为了将我们的结构,热和多物理分析分开,我们仅在第三项研究中对耦合进行了解决。
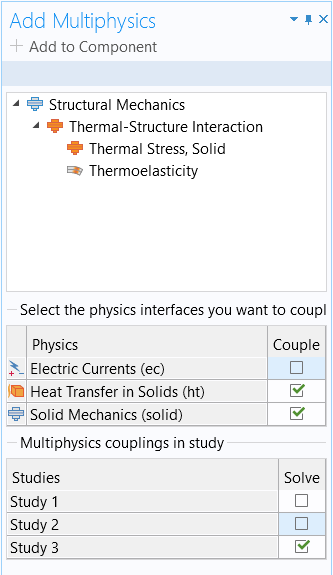
这添加多物理学如上所述,具有完整多物理分析的选择的窗口。
现在,我们可以选择研究3节点,计算它以求解模型方程。完成求解后,生成了三个新的结果图,这些图显示了微驱动器的电气,热和结构结果。选择新生成的应力图表明,在两个热臂之间发展热诱导的应力和应变,从而使它们扩展并弯曲执行器。
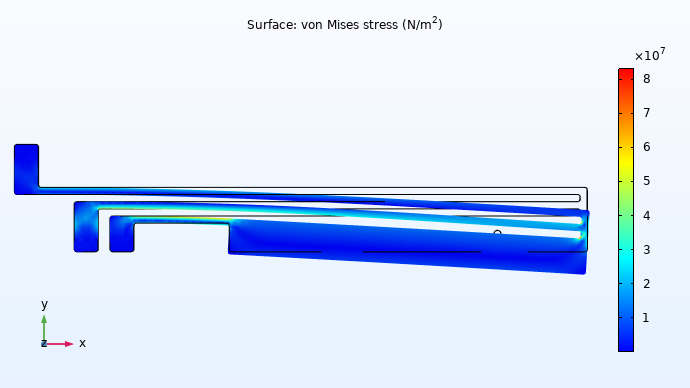
von mises应力分布结果,用于热微导液的多物理分析。黑色几何大纲显示了执行器几何形状的原始配置,表明其由于热膨胀而变形的程度。请注意,使用大约6.6的变形量表因子。
要详细查看使用此方法的分步过程,您可以观看下面的视频以进行完整的演示。
教程视频:使用带有预定义联轴器的手动方法定义多物理模型
建模练习
通过下面列出的后续建模练习将其付诸实践来证明您从本文中获得的知识。为每个建模练习提供的指示包含完成它所需的所有信息,但有意概括以鼓励自我引入问题解决问题。您可以通过手动比较它们或使用的解决方案模型文件来检查实现的实现。比较工具准确识别差异。
- 在本课程的第1部分中,您使用全自动方法构建了母线教程模型。现在,使用具有预定义联轴器方法的手册来定义该模型的物理。使用以下内容文档引用以定义物理设置。几何形状可下载:Busbar.mphbin。
- 在本课程的第1部分中,您使用全自动方法构建了自由对流教程模型。现在,使用具有预定义联轴器方法的手册来定义该模型的物理。使用以下内容文档引用以定义物理设置。几何形状可下载:free_convection.mphbin。
- 跟着方向提供的目的是使用带有预定义联轴器的手动方法来建立母线教程模型的对流冷却。几何文件可下载:busbar_box.mphbin。
提交有关此页面的反馈或联系支持。